

An 8-position strapdown inertial navigation system-level calibration method based on velocity observation
A system-level calibration, strapdown inertial navigation technology, applied in the field of 8-position strapdown inertial navigation system-level calibration based on speed observation, can solve problems such as reducing calibration position scheduling, cumbersome temperature compensation process, shortening calibration time, etc., to avoid Temperature compensation test, avoid the degradation of calibration accuracy, and the effect of short calibration time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] In order to describe the technical solution disclosed in the present invention in detail, further elaboration will be made below in conjunction with the accompanying drawings and specific embodiments.
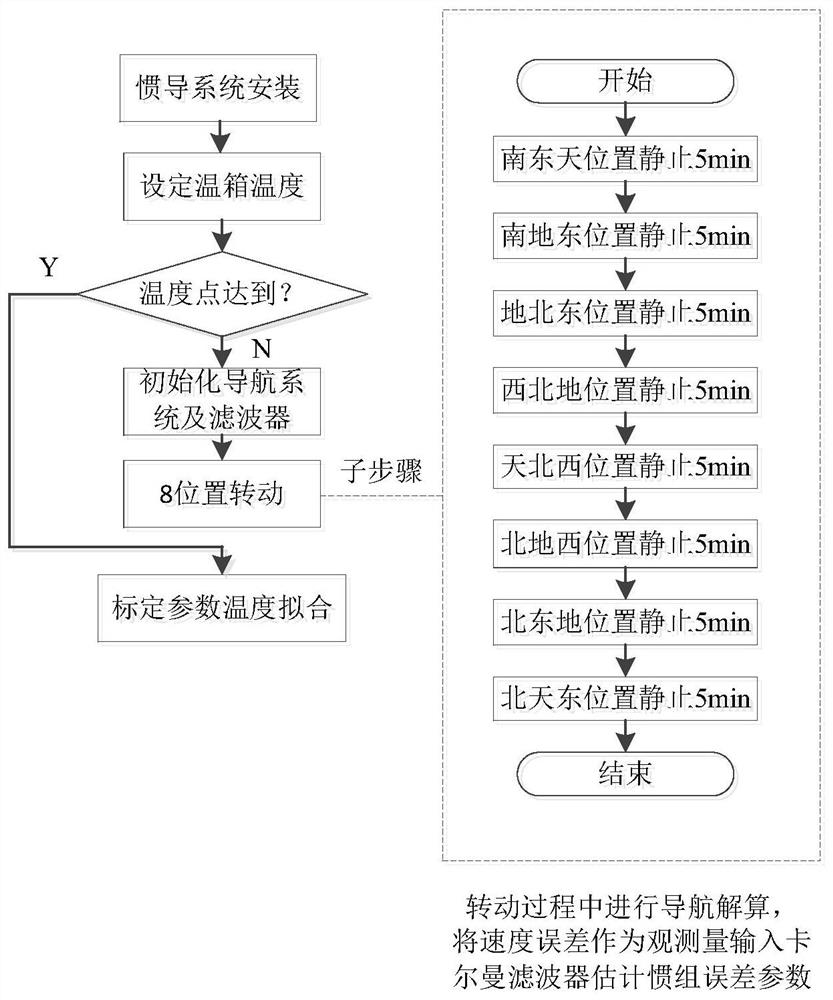
[0083] Such as figure 1 As shown, the 8-position strapdown inertial navigation system-level calibration method of a speed observation of the present invention, the specific steps are as follows:
[0084] (1) Install the strapdown inertial navigation system on a double-axis turntable with a temperature box, and determine the longitude, latitude and height of the test site;
[0085] (2) Set the temperature of the turntable thermostat to 1°C, and power on the SINS;
[0086] (3) After the system temperature is constant, initialize the strapdown inertial navigation system and the Kalman filter;
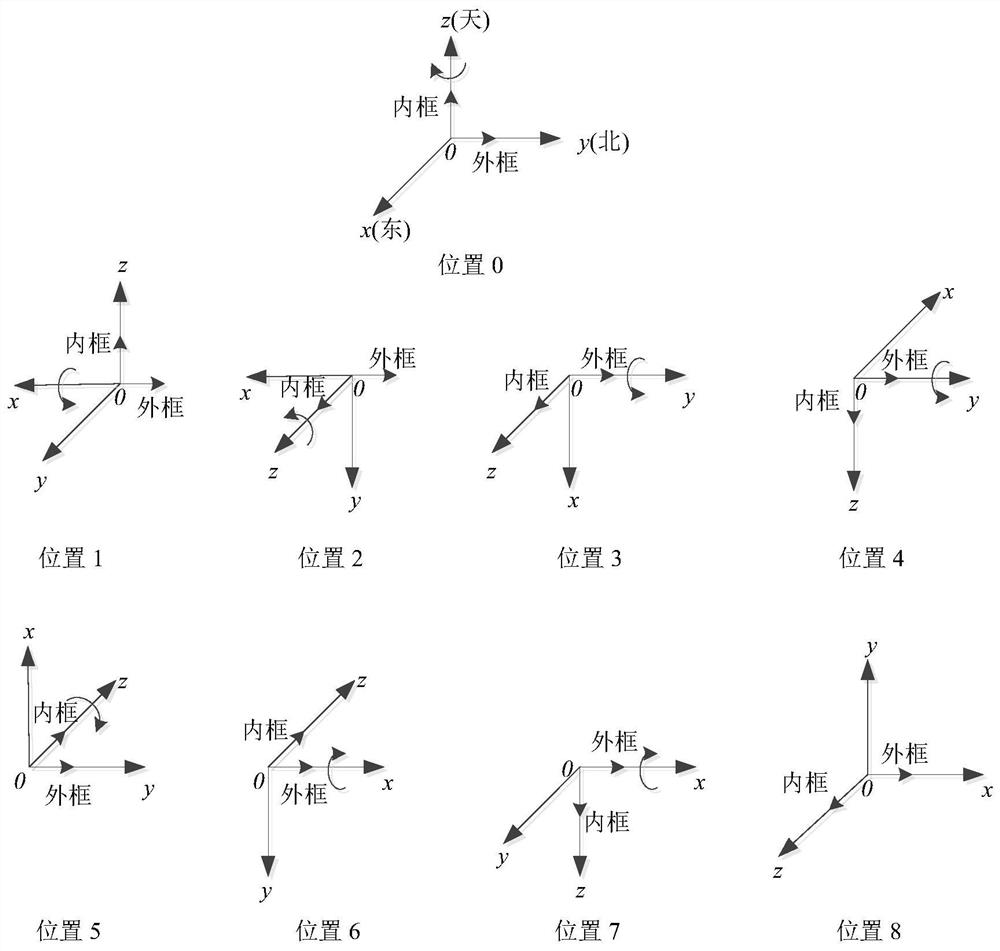
[0087] (4) Control the turntable so that the strapdown inertial navigation system rotates to the 8 positions of Nandongtian, Nandidong, Dibeidong, Xixidi, Tianbeixi, Beidixi, Beido...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More