Unmanned aerial vehicle multi-sensor forward photography tilt flight control debugging method
A multi-sensor and debugging method technology, which is applied in the direction of control/adjustment system, instrument, attitude control, etc., can solve problems such as transmission error, and achieve the effect of reducing transmission error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention is further described in conjunction with the following examples.
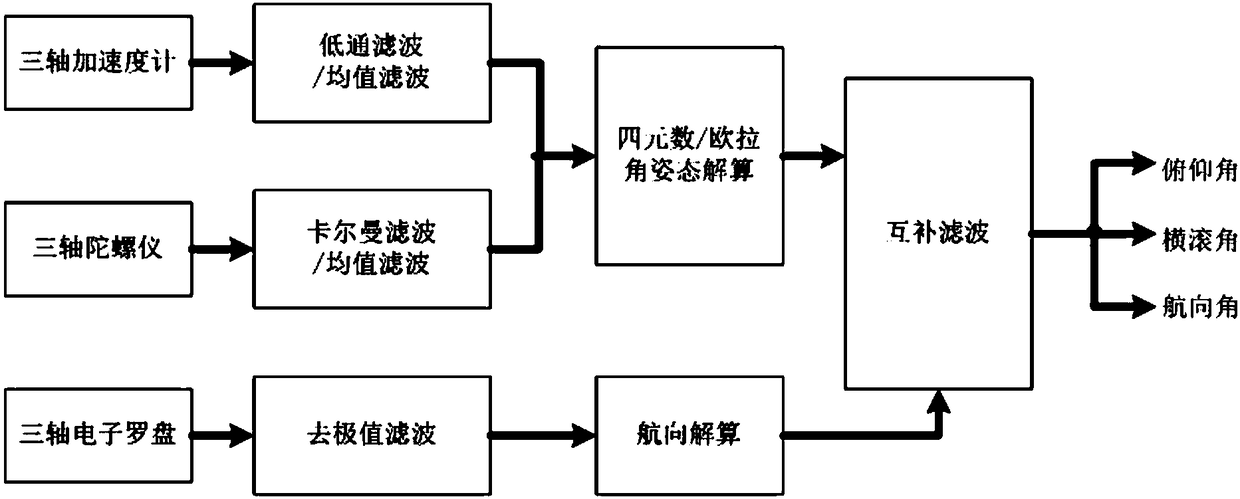
[0033] A kind of unmanned aerial vehicle multi-sensor forward photography tilt flight control debugging method of this embodiment, the unmanned aerial vehicle is the four-rotor unmanned aerial vehicle of X pattern, and it comprises three-axis accelerometer, three-axis gyroscope and three-axis electronic compass , the debugging method includes the following steps (such as figure 1 shown):
[0034] Step 1: Use a low-pass filter or an average filter to filter the signal output by the triaxial accelerometer to improve the signal-to-noise ratio. The average filter has the characteristics of low-pass filtering and is simple to calculate.
[0035] Step 2: Use Kalman filter or average filter to filter the signal output by the three-axis gyroscope. The signal of the three-axis gyroscope has high dynamic characteristics, and its signal noise is mainly Gaussian white noise, which can be filte...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap