

Manipulator underactuated driving structure applied to piano teaching and design method
A structurally designed, underactuated technology, applied in manipulators, program-controlled manipulators, teaching aids, etc., can solve the problems of the overall structure being too heavy, time-consuming and labor-intensive, and difficult to carry and wear. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
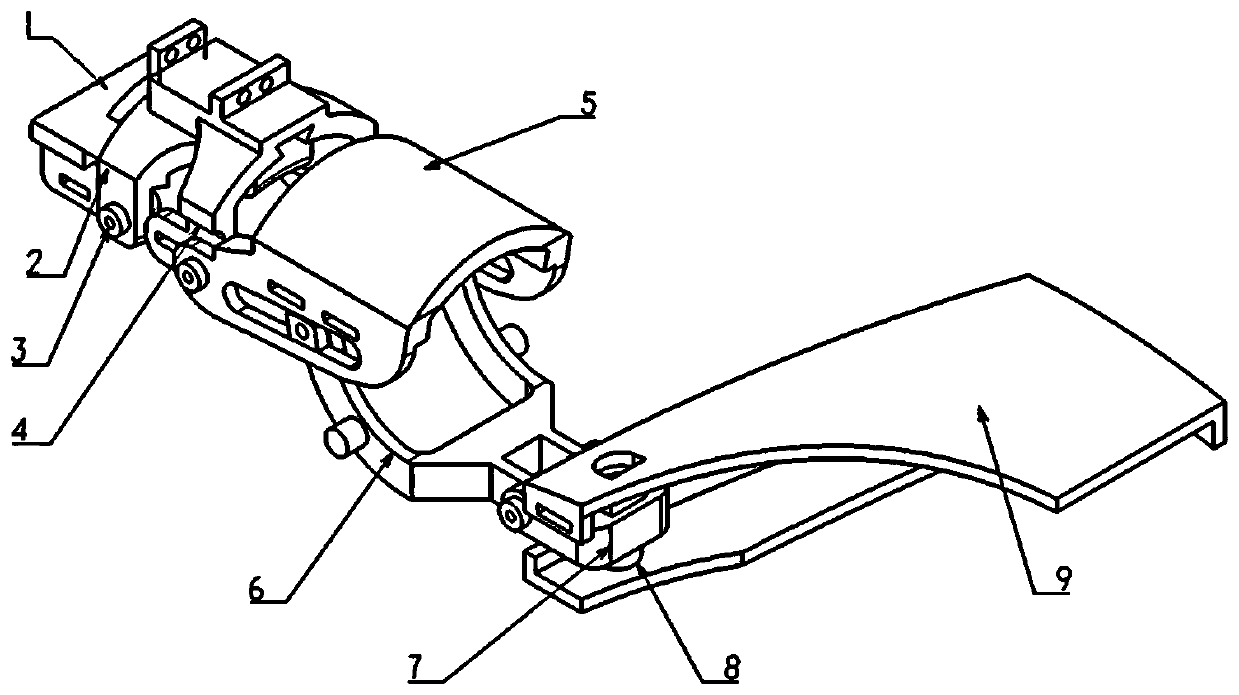
[0082] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
[0083] The present invention provides an under-driven structure and design method of a manipulator applied to piano teaching, which are specifically as follows:
[0084] 1. Under-driven structure design of piano teaching manipulator
[0085] 1.1 Design requirements for under-actuated structure of the piano teaching manipulator
[0086] a) Realize precise control of the movement curve formed by each joint of the finger (spatial curve);
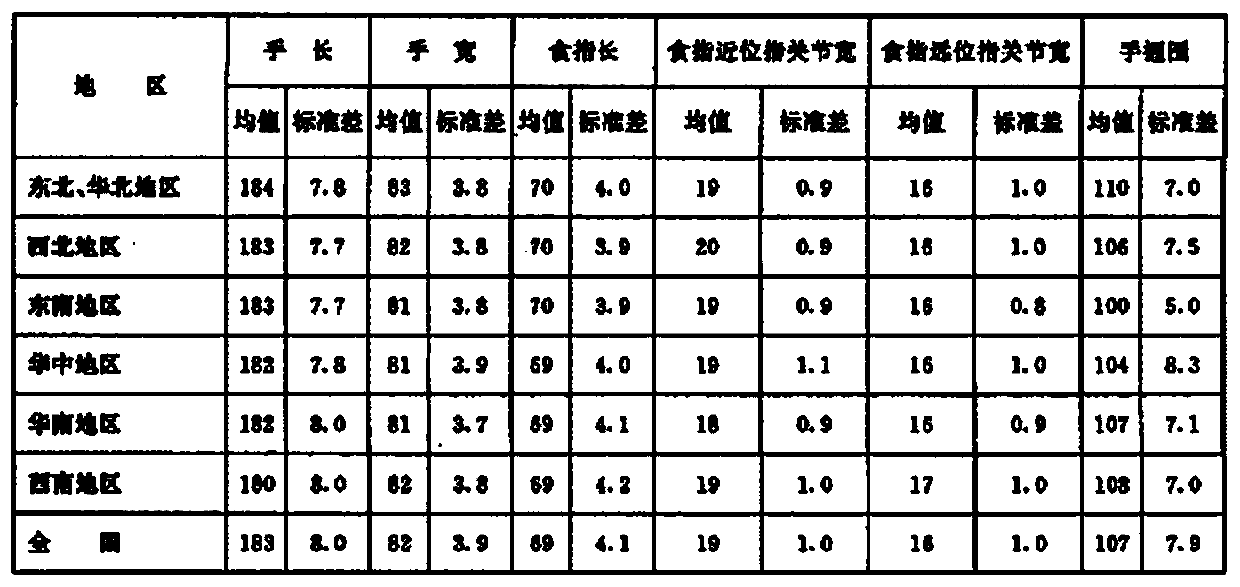
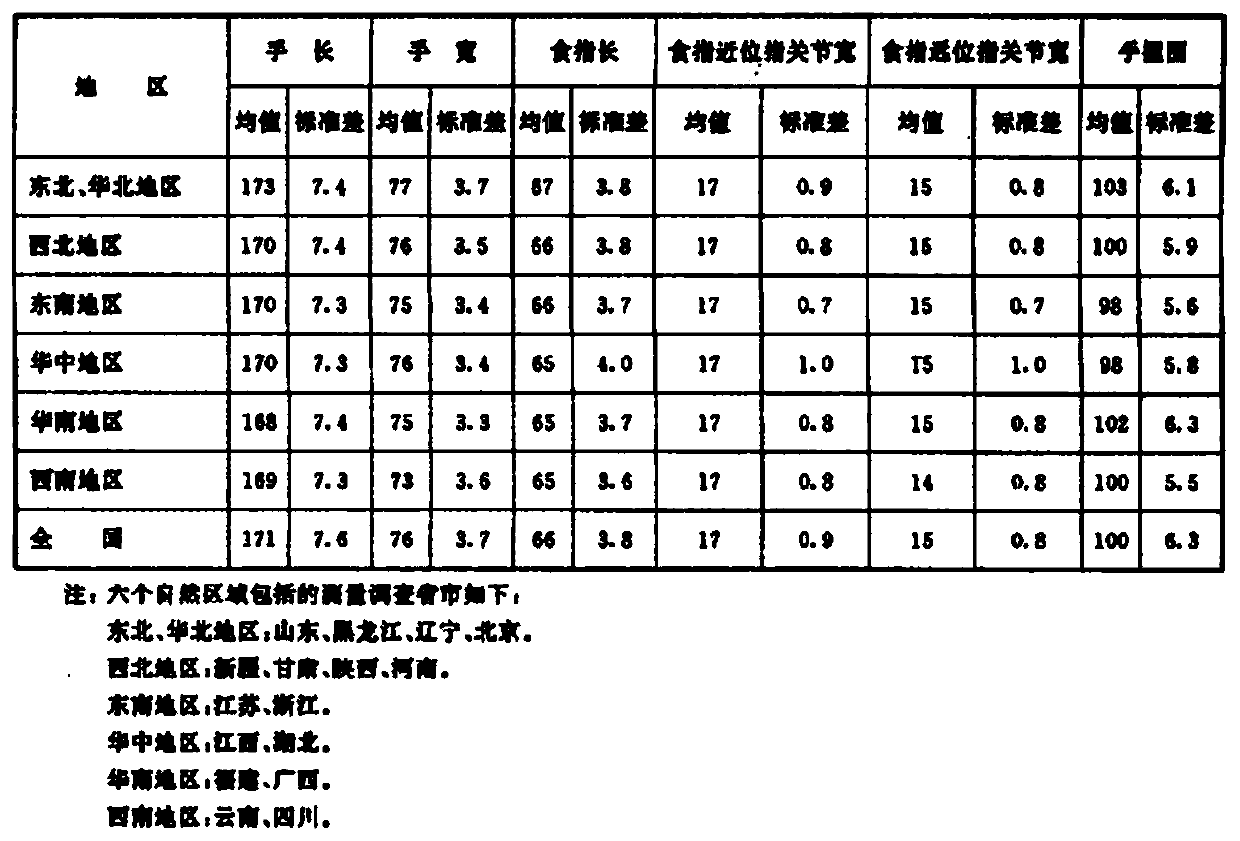
[0087] b) Convenient to wear, strong portability, wide application range, and can be adjusted according to different lengths;
[0088] c) Simple structure, light weight, reducing the weight-bearing feeling, while considering the touch, leaking fingertips. In terms of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More