Human body walking aid
A walking aid and human body technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to hide wear, long-term use of batteries, heavy weight, etc., and achieve the effect of reducing the burden on leg muscles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
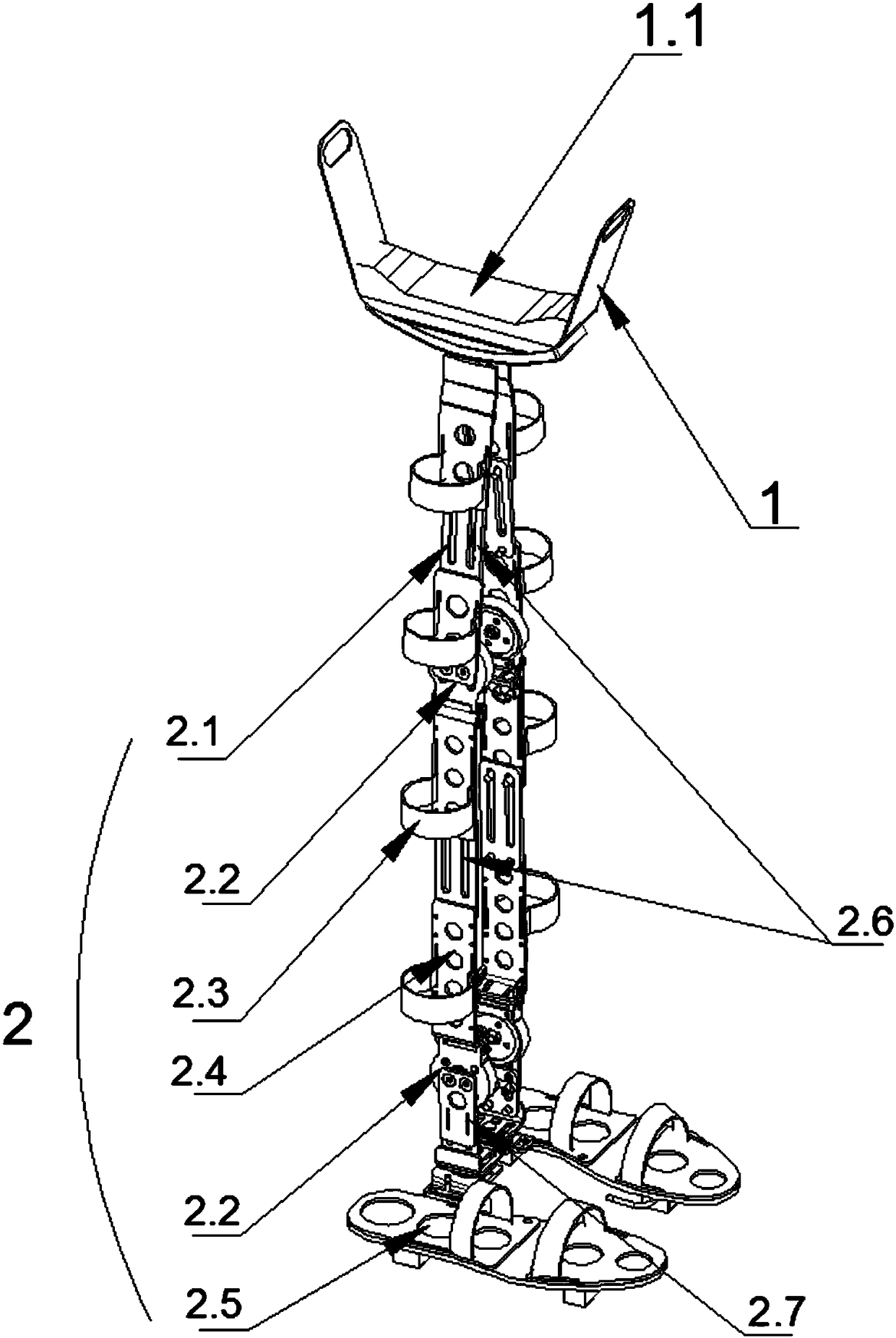
[0032] Such as figure 1 As shown, a human walking aid includes a hip joint support frame 1 and leg support frames 2 symmetrically arranged on both sides of the hip joint support frame 1, and the leg support frame 2 includes a thigh component 2.1 and a calf component 2.4 , ankle member 2.7 and shoes 2.5, said thigh member 2.1 and calf member 2.4 are provided with adjustment devices for adjusting the length, between said thigh member 2.1 and calf member 2.4, between calf member 2.4 and ankle member 2.7 A locking device 2.2 for controlling the degree of bending is provided, a control device is provided on the shoe 2.5, and an auxiliary walking device is provided in the hip joint support frame 1 .
[0033] This embodiment controls the degree of bending of the thigh component 2.1 and the calf component 2.4, the calf component 2.4 and the ankle component 2.7 by setting the locking device 2.2. Since the leg support frame 2 is symmetrically arranged, when the locking device on the lef...
Embodiment 2
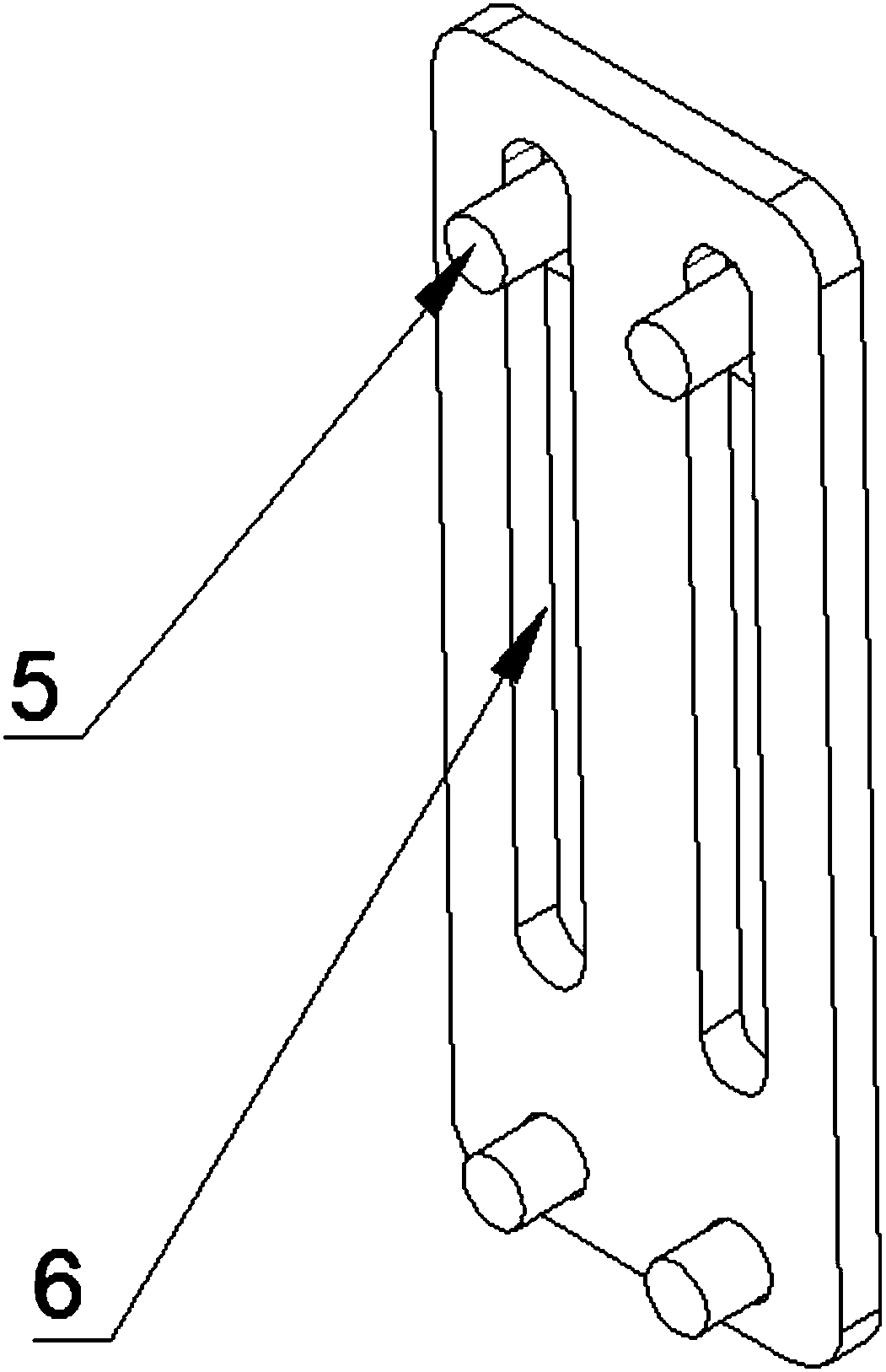
[0035] As a special case of Embodiment 1, such as image 3 As shown, the adjustment device in Embodiment 1 includes an adjustment plate 2.6, one end of the adjustment plate 2.6 is fixedly connected with the leg support frame 2, and the other end is slidingly connected with the leg support frame 2 up and down, and the adjustment plate 2.6 is set inside There is a chute 6, and one end of the adjustment plate 2.6 is slidably connected with the bolt 5 fixed on the leg support frame 2 through the chute 6.
[0036] The adjustment device is a plurality of adjustment plates 2.6. The purpose of adjusting the height of the thigh member 2.1 and the calf member 2.4 is achieved through the movement of the chute 6 in the adjustment plate 2.6. While adjusting the height, the auxiliary walking device in the hip joint support frame 1 can be adjusted The longer the length of the leg support frame 2, the greater the deformation, the greater the auxiliary power provided, and the better adaptabili...
Embodiment 3
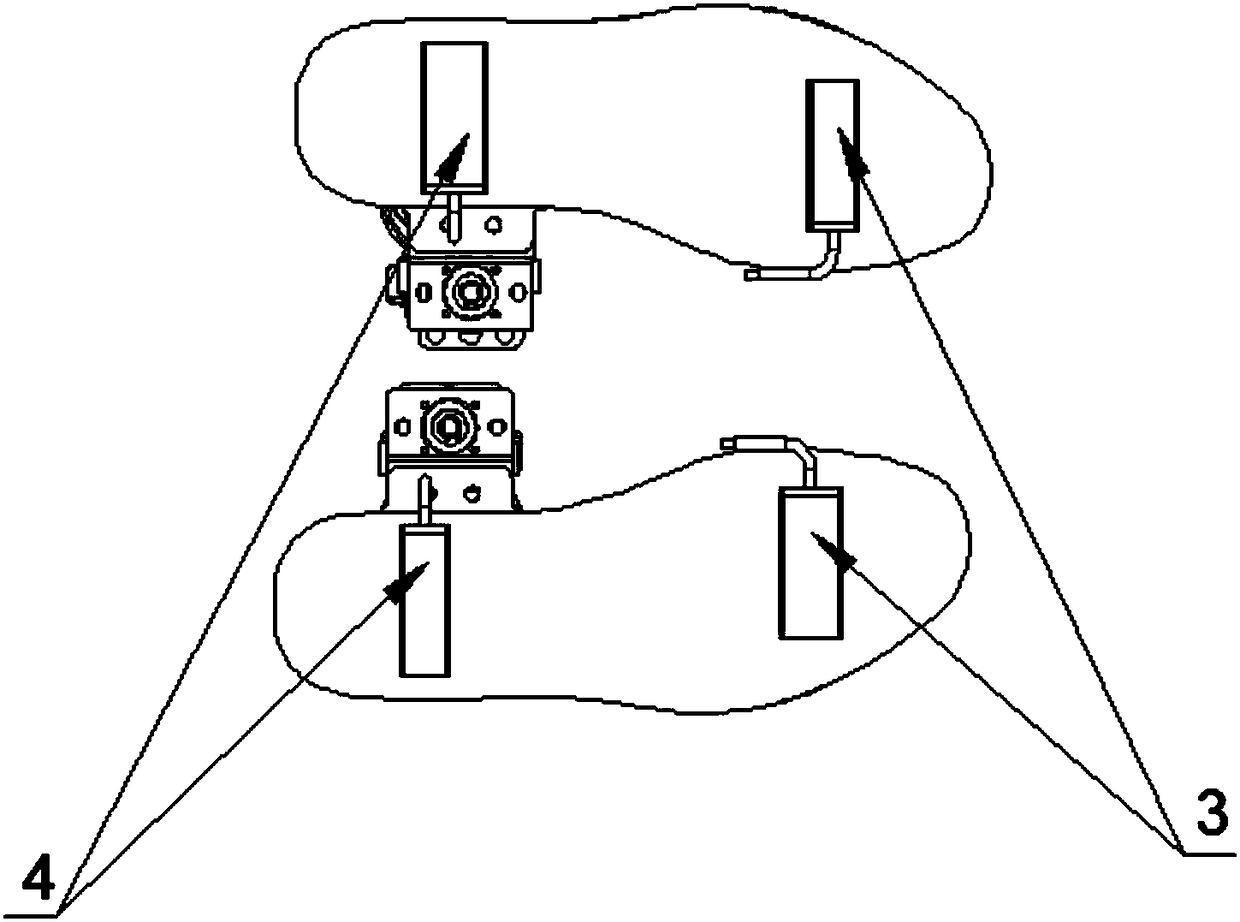
[0038] As a special example of Embodiment 1, the control device in Embodiment 1 includes an air pressure adjustment device arranged under the shoe 2.5, the air pressure adjustment device is connected to the locking device 2.2, and the air pressure adjustment device includes a front door located at the front end of the bottom of the shoe 2.5. The airbag 3 and the rear airbag 4 located at the rear end of the bottom of the shoe 2.5, the front airbag 3 is connected to the locking device 2.2 between the calf member 2.4 and the ankle member 2.7 for controlling the ankle joint, and the rear airbag 4 is connected to the thigh member 2.1 and Between the lower leg members 2.4 is used to control the locking device 2.2 of the knee joint.
[0039] The air pressure adjustment device controls the locking device 2.2 of the ankle joint through the front air bag 3, and the locking device 2.2 of the knee joint is controlled by the rear air bag 4, simulating that the back sole of the foot touches ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap