

Accurate positioning method for calibration point center coordinate
A center coordinate and precise positioning technology, which is applied in the field of projection interaction, can solve problems such as errors and cannot be well applied to precise positioning in various areas, and achieve the effect of satisfying positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0052] The present invention will be further described below in conjunction with accompanying drawing:
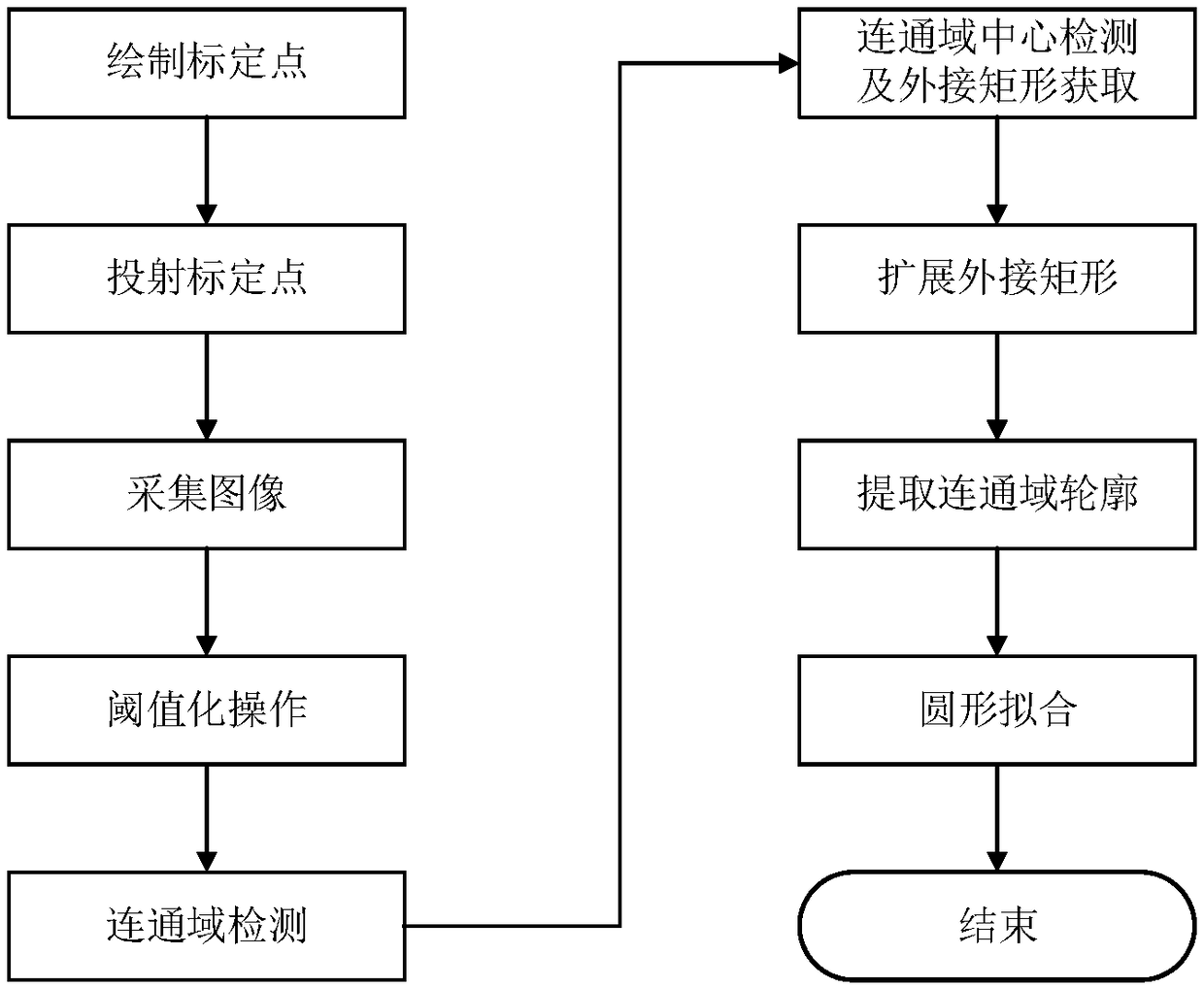
[0053] Such as Figure 1-3 As shown, a precise positioning method for the coordinates of the center of the calibration point includes the following steps:
[0054] S1: Draw calibration points on the computer screen;
[0055] S2: Use the projector to project the picture on the computer screen onto the wall of the projection area, and the computer controls the camera to collect the picture of the projection area through instructions, so as to obtain a grayscale image G with calibration points;
[0056] S3: Thresholding the grayscale image;
[0057] The threshold in this embodiment is an empirical threshold, and the principle of thresholding is as follows: traverse each pixel in the grayscale image, if the grayscale value corresponding to the point (x, y) is less than the threshold, then the value of the pixel at the point Reset to 0, that is, mark it as black, otherwise ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More