

Flexible creep climbing robot
A robot and flexible technology, applied in the field of climbing robots, can solve the problems of inability to automatically adapt to obstacles, difficult to deal with cables with curvature, etc., and achieve the effect of good environmental adaptability and good obstacle crossing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
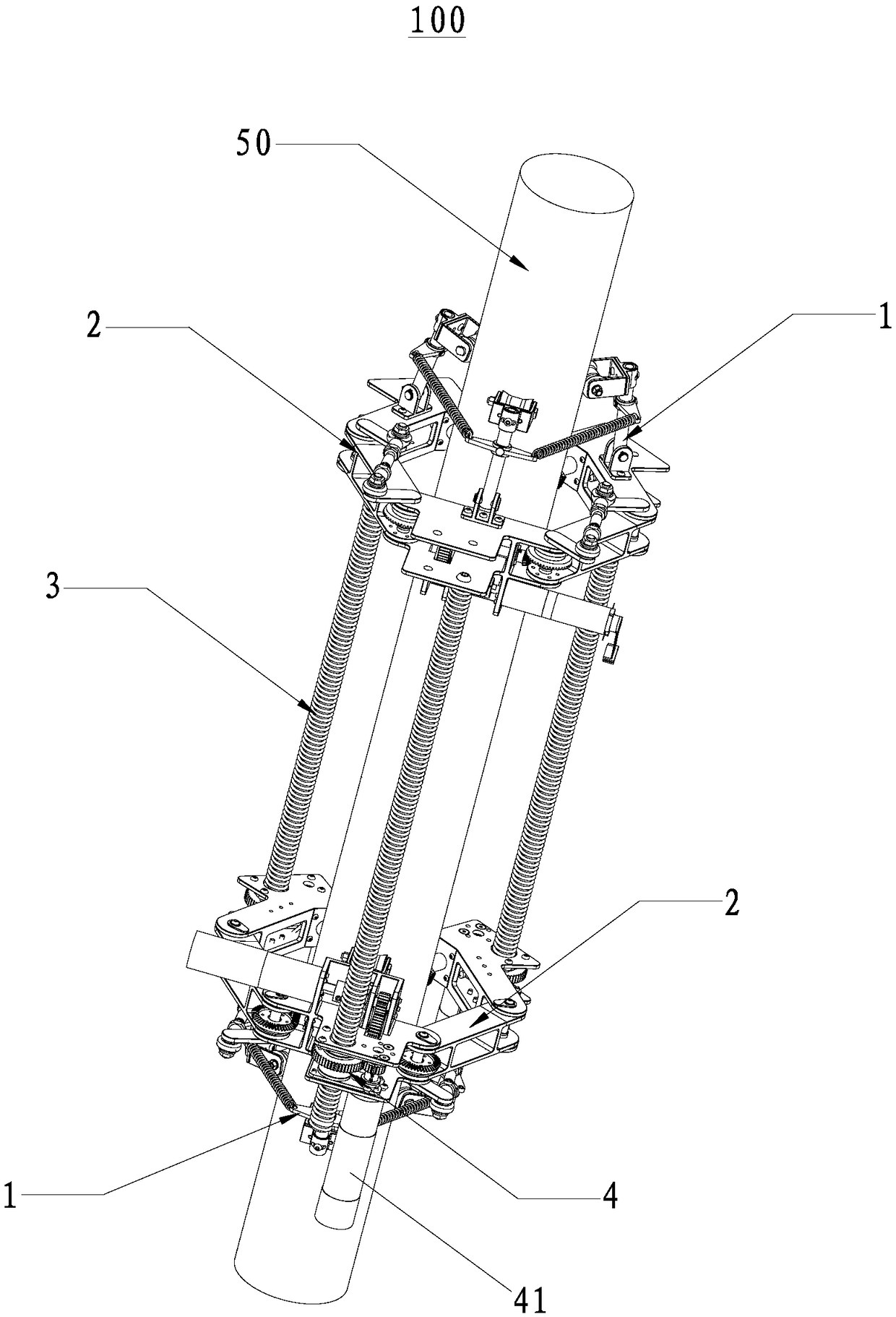
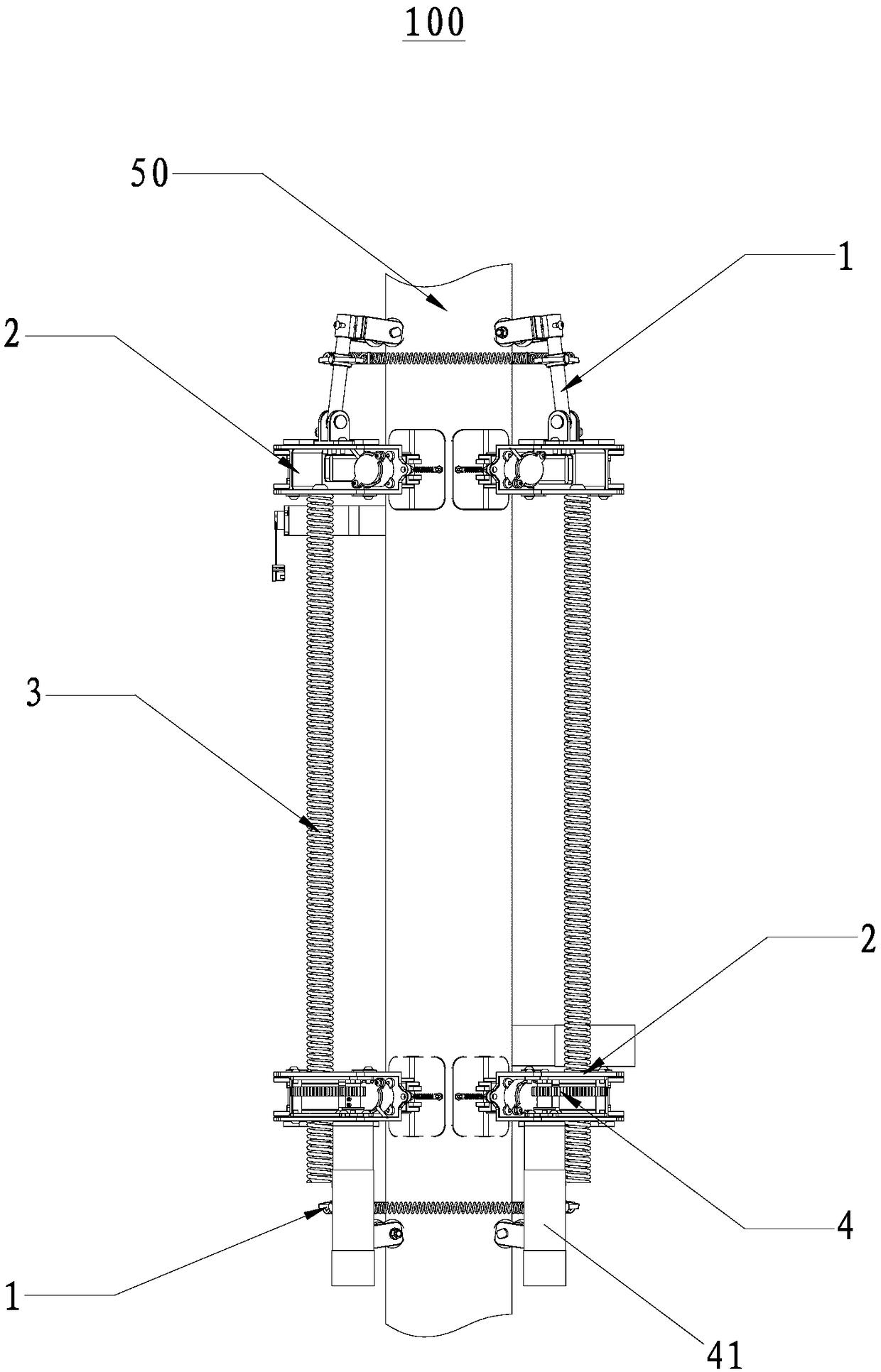
[0031] Such as figure 1 with figure 2 As shown, a flexible crawling climbing robot 100 provided by an embodiment of the present invention includes two guiding assemblies 1 , two open clamping assemblies 2 , a main spring 3 and a driving assembly 4 .
[0032] The two open clamping components 2 are arranged at intervals along the axial direction of the cable 50, and can be opened and closed along the radial direction of the cable 50, so that the open clamping components 2 can clamp different diameters. The cable has a large diameter change range; and at any time, at least one open clamping assembl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More