

System and method for locating inspection robot in petrochemical plant
A technology of inspection robots and positioning systems, applied in satellite radio beacon positioning systems, radio wave measurement systems, instruments, etc., to achieve the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
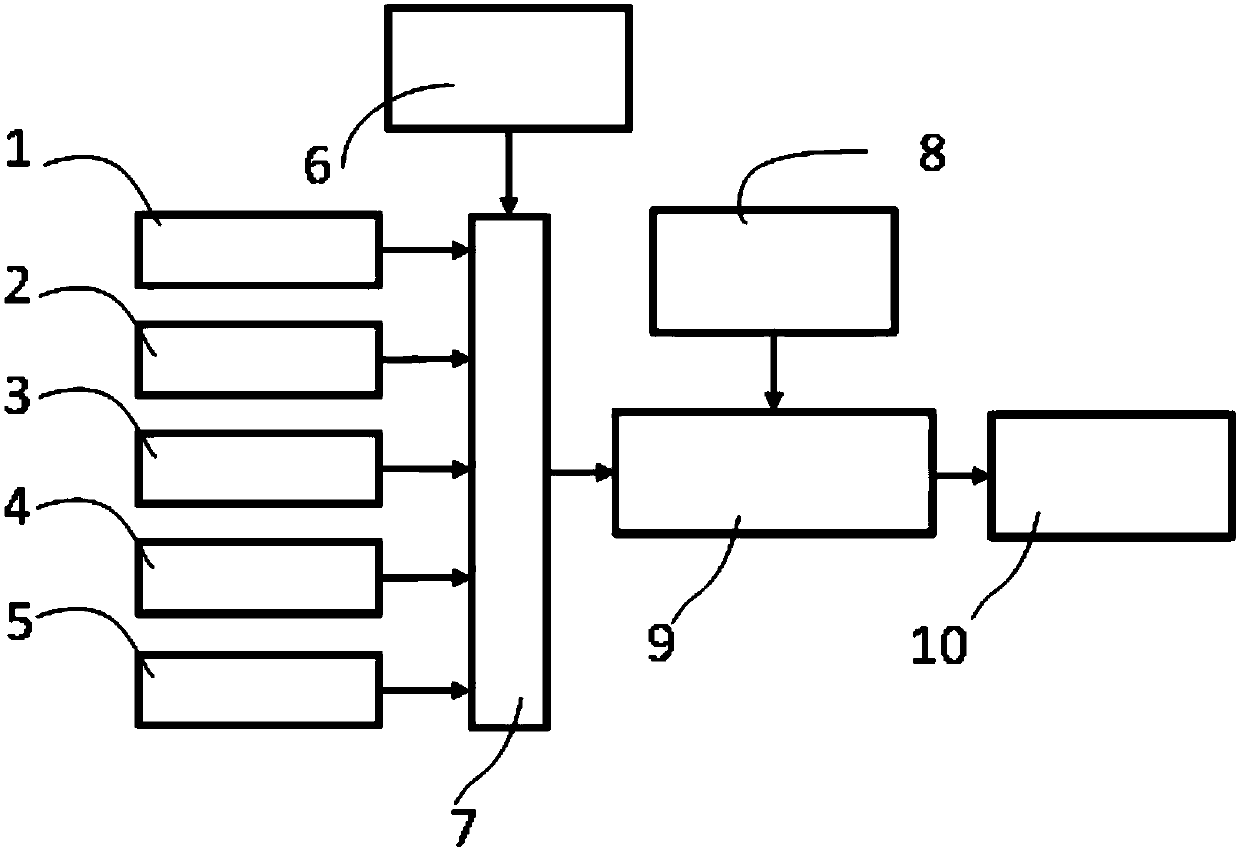
[0050] Such as figure 1 As shown, the petrochemical plant inspection robot positioning system designed by the present invention includes a GPS observation unit 1, a UWB observation unit 2, a visual observation unit 3, a laser observation unit 4, a mileage observation unit 5, an environment model prior information module 6, a combination Decision-making module 7 , inertial state estimation module 8 , available positioning observation / SINS combination module 9 and positioning information fusion module 10 .
[0051] The combined decision-making module 7 receives the environmental map model stored in the environmental model prior information module 6, combines each observation data to perform positioning based on the multi-layer map, judges the available observation type, and sends the available observation data to the available positioning ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More