

Adaptive loS guidance method for hovercraft path tracking based on sideslip compensation
A path tracking and hovercraft technology, which is applied in the field of hovercraft path tracking and adaptive LOS guidance, can solve problems such as easy to produce sideslip and affect the accuracy of path tracking, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
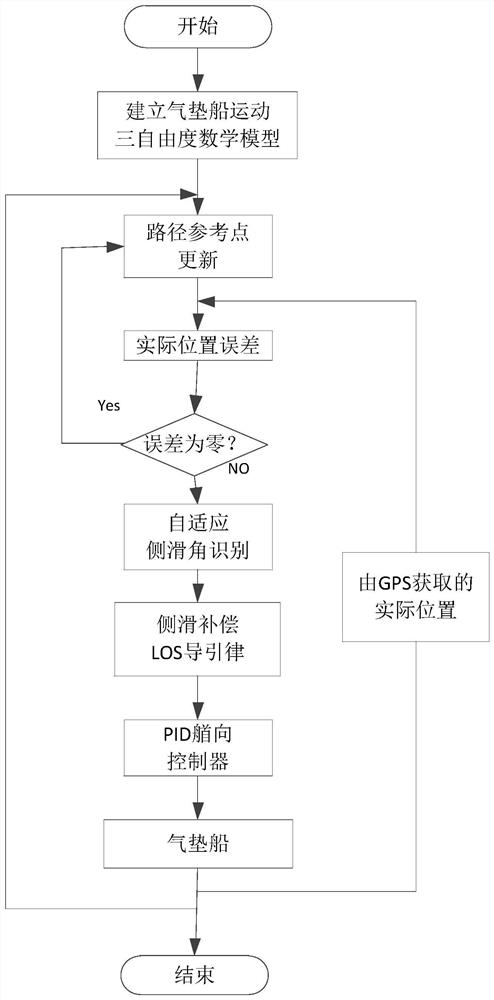
[0054] Such as figure 1 , an adaptive LOS guidance method for hovercraft path tracking based on sideslip compensation, including the following steps:
[0055] Step (1): Establish a three-degree-of-freedom mathematical model of the hovercraft:
[0056] To study space moving bodies, establish a fixed coordinate system and a hull motion coordinate system, and establish a three-degree-of-freedom motion mathematical model for the three degrees of freedom of the hovercraft, sway, surge, and yaw.
[0057] Three degrees of freedom motion mathematical model:
[0058]
[0059]
[0060]
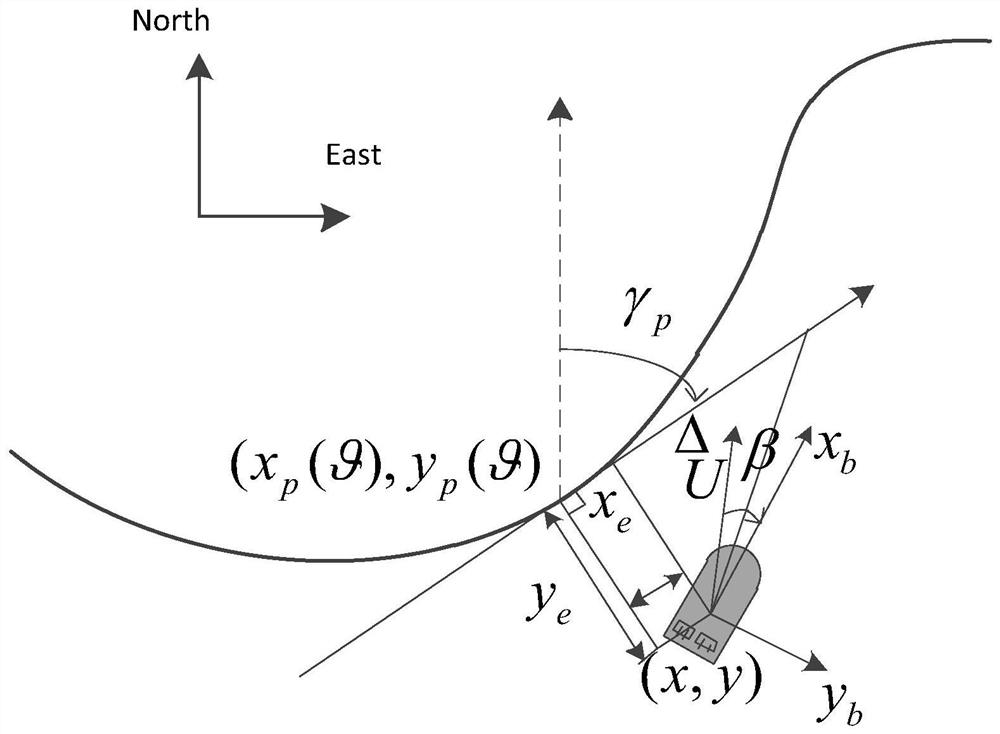
[0061] In the above formula, η=[x,y,ψ] T , (x,y) indicates the position of the hovercraft, ψ indicates the heading angle; υ=[u,v,r] T , u represents the speed of the hovercraft, v represents the angular velocity of the hovercraft, r represents the distance from the hovercraft to the measuring point; M=diag{m, m, I z}, m represents the mass of the hovercraft, I z Indicates moment of inertia; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More