

A Horizontal Plane Adaptive Trajectory Tracking Control Method for Autonomous Underwater Vehicles
An underwater vehicle, trajectory tracking technology, applied in two-dimensional position/channel control, control/regulation system, non-electric variable control and other directions, can solve the problem of AUV speed cannot be obtained
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
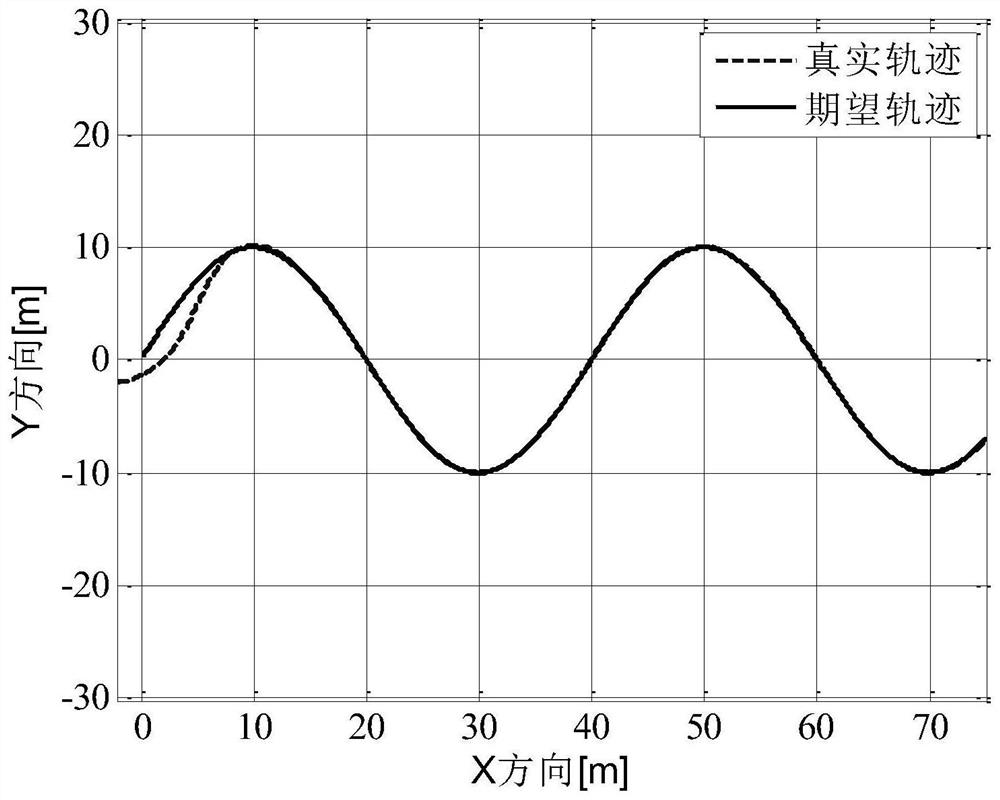
[0110] Step 1: The AUV starts trajectory tracking from the initial point (-2, -2) with an initial heading angle of 0° in the inertial coordinate system. The initial forward velocity and lateral velocity are both 0m / s and 0m / s, the angular velocity is 0m / s, and the desired reference trajectory is:
[0111]
[0112] The external interference of AUV is
[0113]
[0114] Step 2: Select the control input as
[0115]
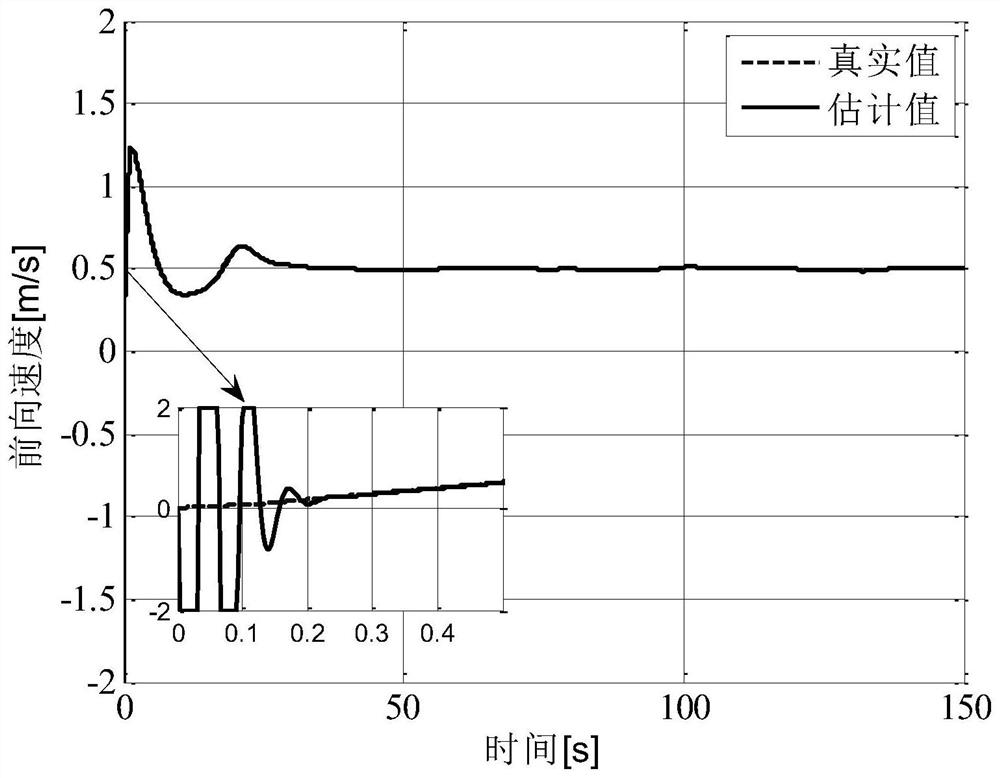
[0116] Among them, k 3 =300,k 4 = 150, the initial value of the high-gain observer is 0, the parameters of the high-gain observer are selected as ε = 0.01, λ = 1, at this time the estimated velocity of the AUV in the body coordinate system is
[0117]
[0118] Select parameter k 1 =0.1,k 2 = 0.1, select the tracking error value δ = 0.2, and calculate the expected input r of the kinematic model vir and u vir :
[0119]
[0120] uvir =k 2 (ρ-δ)+U cosχ
[0121] Calculate the distance ρ between the current position of the AUV and the position of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More