Method for continuously going up stairs and going down stairs of automatic rolling traveling device
A walking device and stair technology, used in motor vehicles, transportation and packaging, non-electric variable control and other directions, can solve the problems of increasing inclination angle, easy to overturn, and the whole machine cannot complete continuous and stable up and down stairs, and achieve continuous and stable Up and down, the effect of simple control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0094] 1. Use the yaw motor to yaw the gyro to the maximum utilization position.
[0095] 2. The yaw motor swings the gyro at a certain speed, and the gyro torque generated makes the main body lean back.
[0096] 3. Detect whether it has reached the edge of the stairs. When the gyro precession angular velocity is greater than a certain threshold, it is determined that the edge of the stairs to be descended has been reached.
[0097] 4. The next time the stairs, the main drive motor drives the wheels forward and slowly drives downstairs.
[0098] 5. Confirm that the descent of the stairs was successful. In the process of descending the stairs, the direction of the gravity moment on the gyroscope is different. When the whole machine goes down the stairs successfully, the yaw direction of the gyro changes. At this time, the sensor detects the direction change and judges that it is successfully going down the stairs.
[0099] 6. Repeat step 4 and step 5 until it is detect...
Embodiment 2
[0102] 1. Get ready for the stairs.
[0103] Use the yaw motor to yaw the gyro to the maximum available angle.
[0104] 2. Determine whether you have reached the edge of the stairs you want to go down.
[0105] When the precession angular velocity of the gyro is greater than a certain threshold, it is determined that the robot has reached the edge of the stairs to be descended.
[0106] 3. Go down the first staircase.
[0107] The drive motor drives the wheels forward to drive down the stairs, and the gyro will naturally deflect in a certain direction at this time, but at this time the given speed of the drive motor is zero (that is, there is no relative position change between the main body and the gyro), and the deflection is used to The motor applies a reverse yaw moment to the gyroscope. At this time, the robot slowly descends the stairs under the action of the drive motor and the yaw motor, and the main body and the whole machine roll together.
[0108] 4. Confirm t...
Embodiment 3
[0120] 1. Get ready to go down the stairs. Use the yaw motor to yaw the gyro to the maximum utilization position, but keep the main body in a vertical state.
[0121] 2. Determine whether the robot has reached the edge of the stairs to go down. When the precession angular velocity of the gyro is greater than the set threshold, it is determined that the edge of the stairs to be descended has been reached.
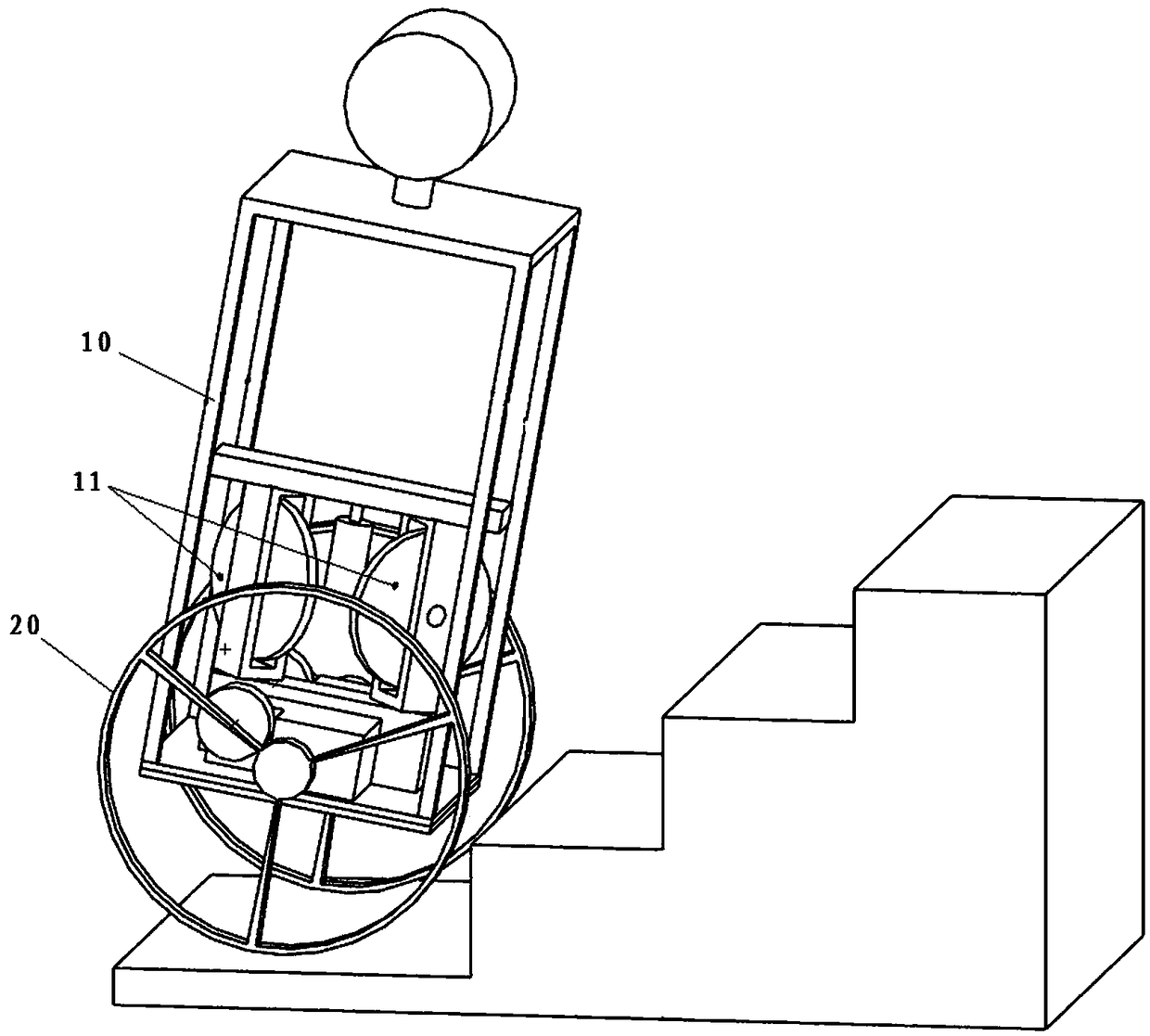
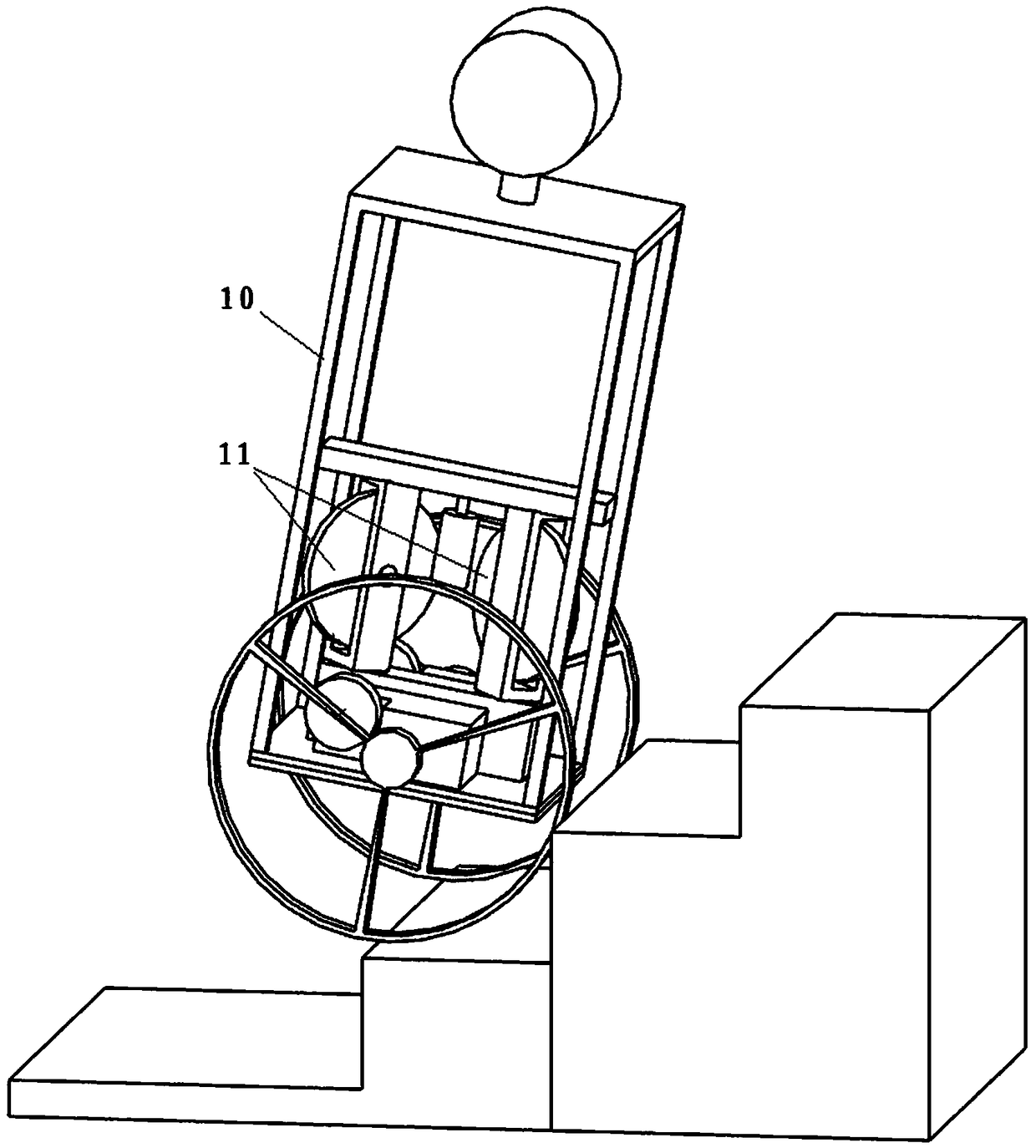
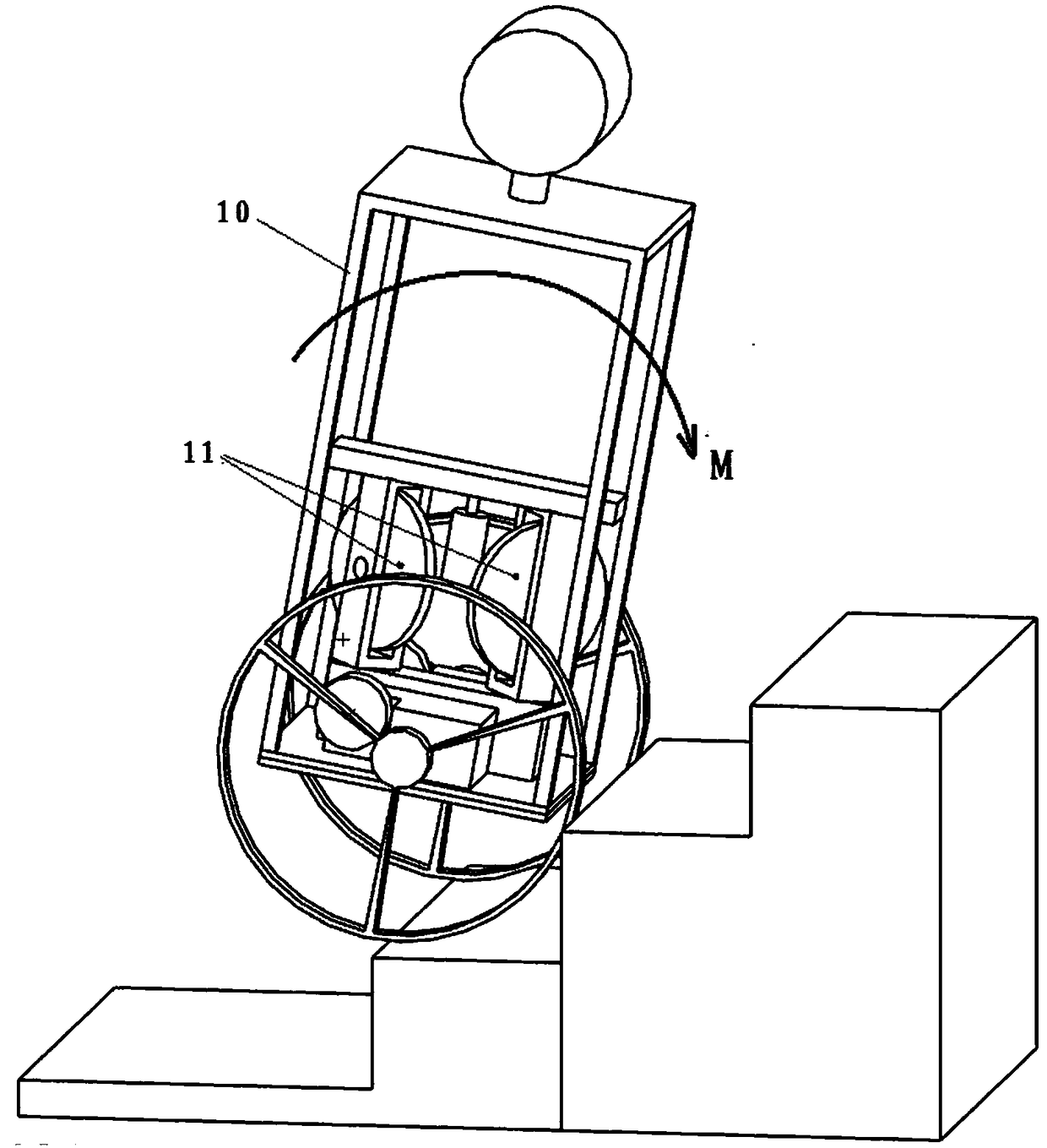
[0122] 3. Go down a flight of stairs. The drive motor drives the wheels forward to drive down the stairs, and the gyro will have a natural tendency to yaw at this time. At this time, the given speed of the drive motor is zero, and the yaw motor is used to apply a reverse yaw moment to the gyro. Under the action of the driving motor and the yaw motor, it slowly rolls down the stairs. At this time, the main body and the whole machine roll together, and the main body leans forward.
[0123] 4. After going down a section of stairs, adjust the main body to a vertical state. S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More