

Automatic rolling traveling device and motion control method thereof
A technology of a walking device and a control method, which is applied to bicycles, control drives, control devices, etc., can solve the problems of inability to go up and down stairs continuously, inability to go up and down stairs, and inability to meet safe braking distances.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
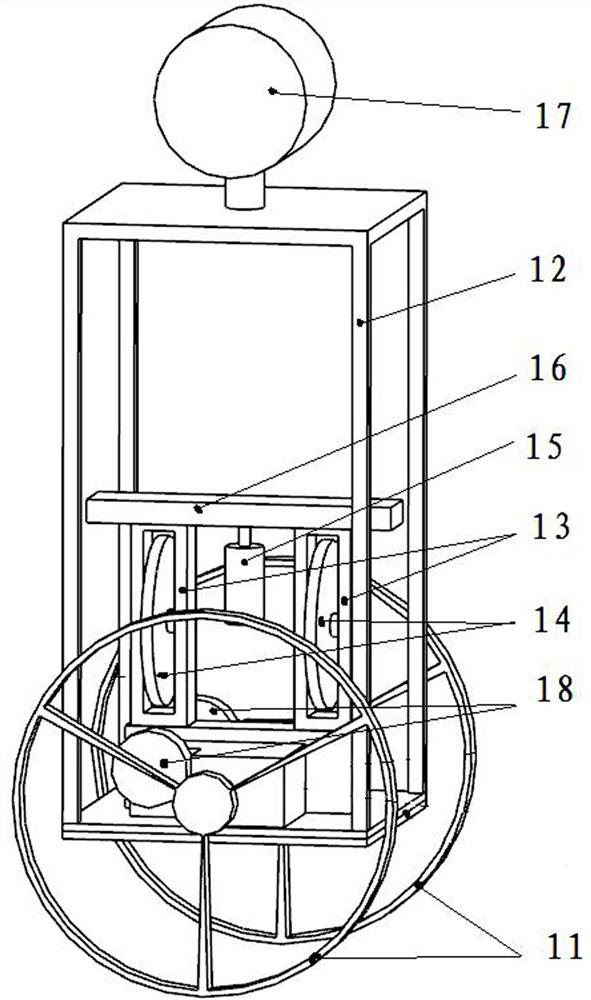
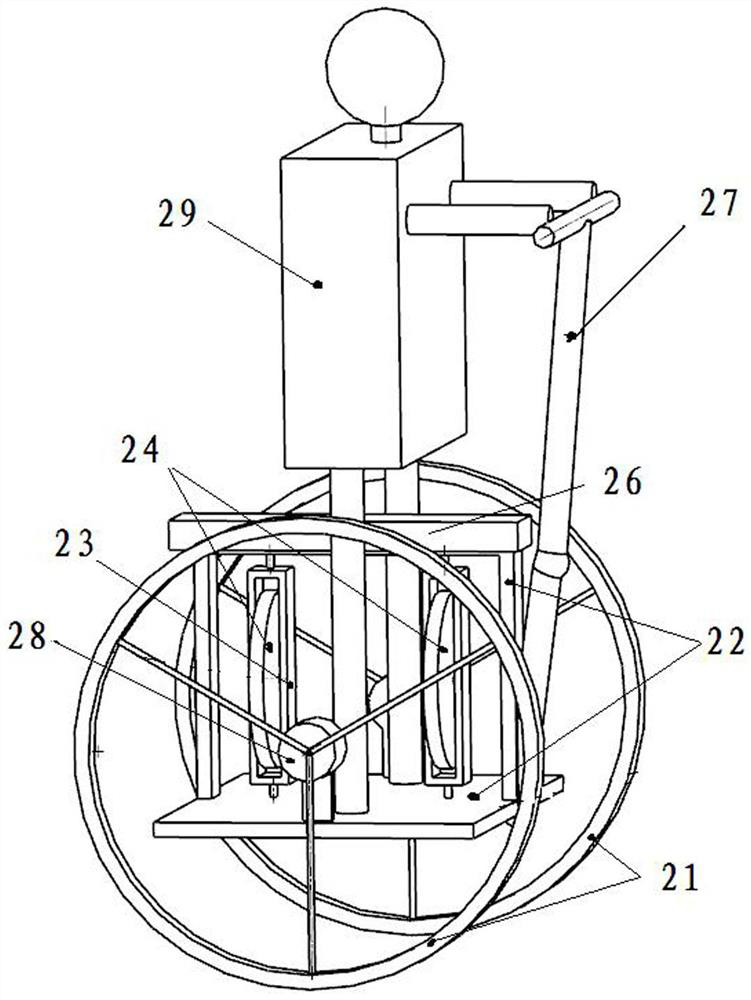
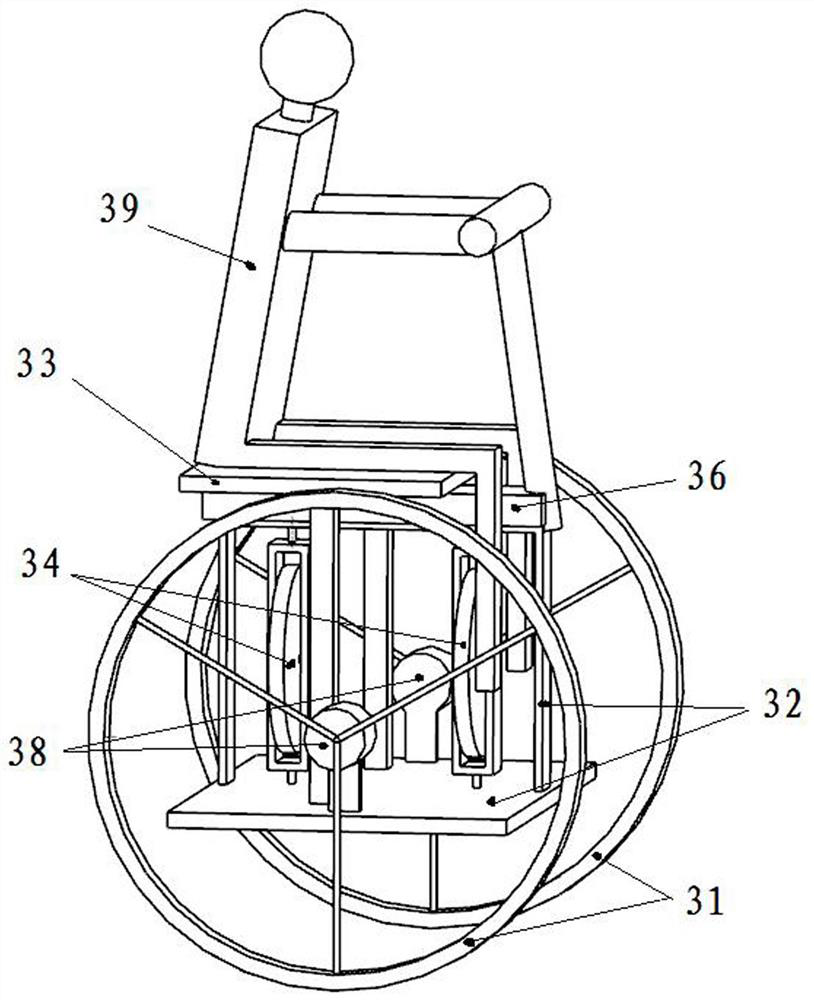
[0063] Embodiments of the present invention will now be described in detail in conjunction with the accompanying drawings.
[0064] An automatic rolling walking device, comprising a main body and wheels, a gyro assembly is arranged inside the main body, and the gyro assembly includes at least one pair of gyroscopes, a yaw motor for controlling the active deflection of the gyroscope, and a yaw motor for controlling the yaw speed of the pair of gyroscopes to be the same but yaw The reverse synchronous mechanism with the opposite direction; the gravitational moment generated by controlling the center of gravity of the main body of the automatic rolling walking device makes the gyro passively deflect, and or controls the gyro torque generated by the yaw motor to control the active deflection of the gyro, and then utilizes the gyro torque Controlling the movement of the walking device, the movement includes but not limited to maintaining balance, adjusting posture, going up and down...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More