

Method for unmanned aerial vehicle to track water target based on time optimum
A time-optimized, target-to-be-tracked technology, applied in the direction of non-electric variable control, instruments, control/regulation systems, etc., can solve problems such as unconsidered safety obstacle avoidance, long time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] Hereinafter, specific embodiments of the present invention will be further described in conjunction with the accompanying drawings.
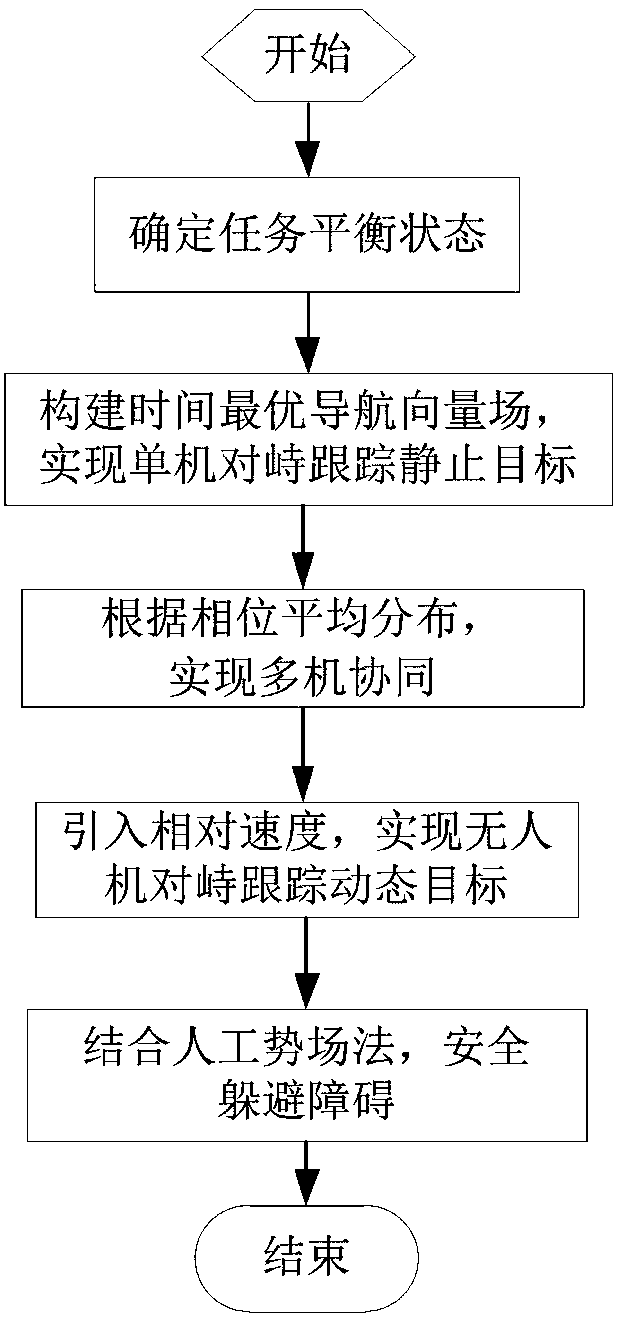
[0064] The invention proposes a time-optimized method for unmanned aerial vehicles to track water targets, which can be applied to the fields of tracking, search and rescue of water targets, and the method has high real-time and fast tracking performance.
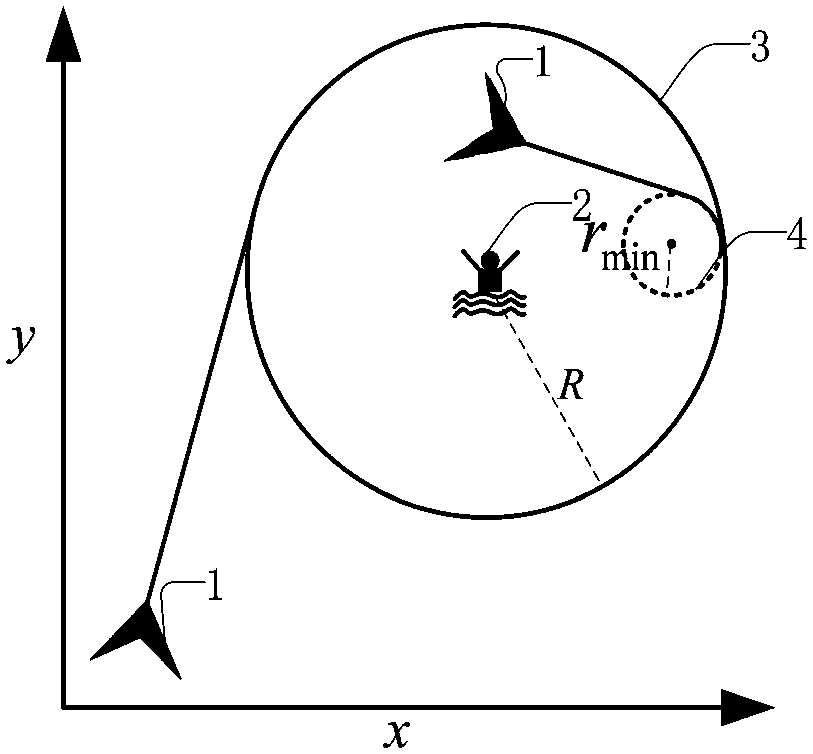
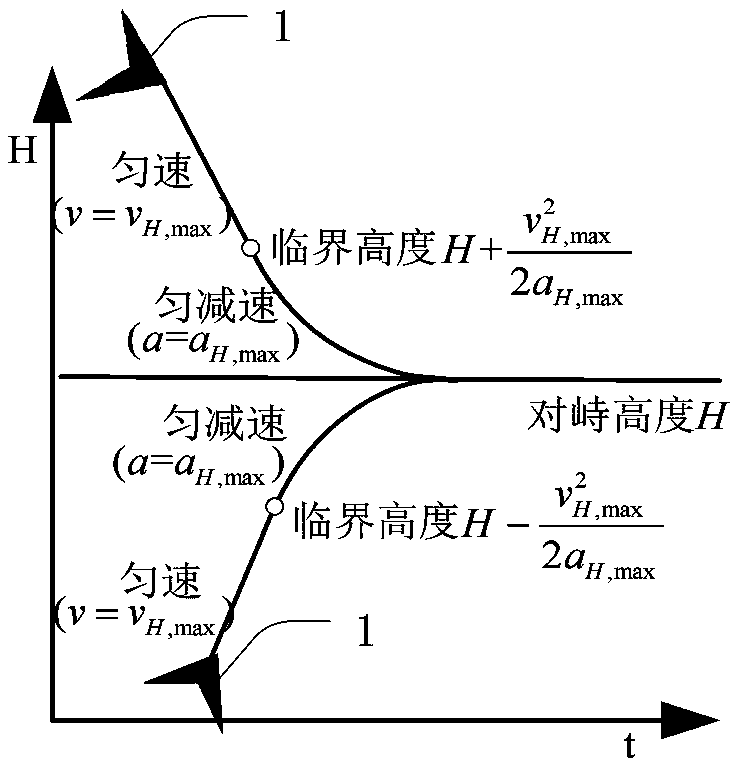
[0065] A time-optimized UAV tracking method for water targets, the premise of which is to assume that the state information of the water target is known, and the movement of the UAV in the horizontal plane and the longitudinal plane is decoupled. Among them, the water targets include water moving targets and water static targets, and the status information of the water targets includes information such as the position and speed of the water targets; the movement of the UAV can be decomposed into two directions of movement, one is the movement of the horizontal plane, and the other is th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More