

Target object fast ranging method based on binocular vision
A technology of target object and distance measurement method, which is applied in the field of computer vision, can solve the problems of feature point inclusion and mismatch, and achieve the effect of speeding up
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
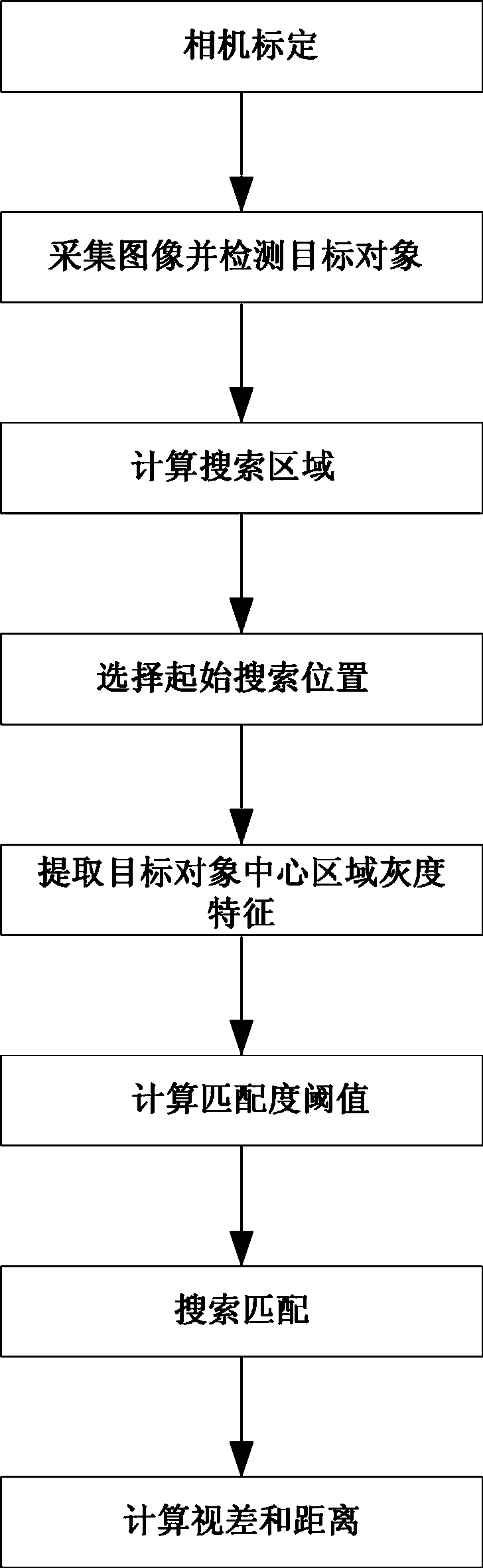
[0047] Such as figure 1 As shown, the present invention is a fast ranging method for target objects based on binocular vision, including the following steps:
[0048] (1) Camera calibration
[0049] (2) Collect images and detect target objects
[0050] (3) Calculate the search area
[0051] (4) Select the starting search position
[0052] (5) Extract the gray features of the central area of the target object
[0053] (6) Calculate the matching threshold
[0054] (7) Search and match
[0055] (8) Calculate parallax and distance
[0056] Step (1) specifically includes:
[0057] In this embodiment, the Zhang Zhengyou chessboard calibration method is used to calibrate the horizontally placed camera to obtain the camera's internal parameter matrix, external parameter matrix, distortion coefficient and respective rotation matrix when the two cameras are paral...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More