

Automatic driving system applied to road sweeping vehicle and control method and device thereof
An automatic driving and road cleaning technology, which is applied in the direction of non-electric variable control, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problem of increasing road congestion, slow driving speed, and road cleaning vehicle size Large and other problems, to achieve the effect of low cost, saving labor costs, and reducing traffic pressure during the day
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
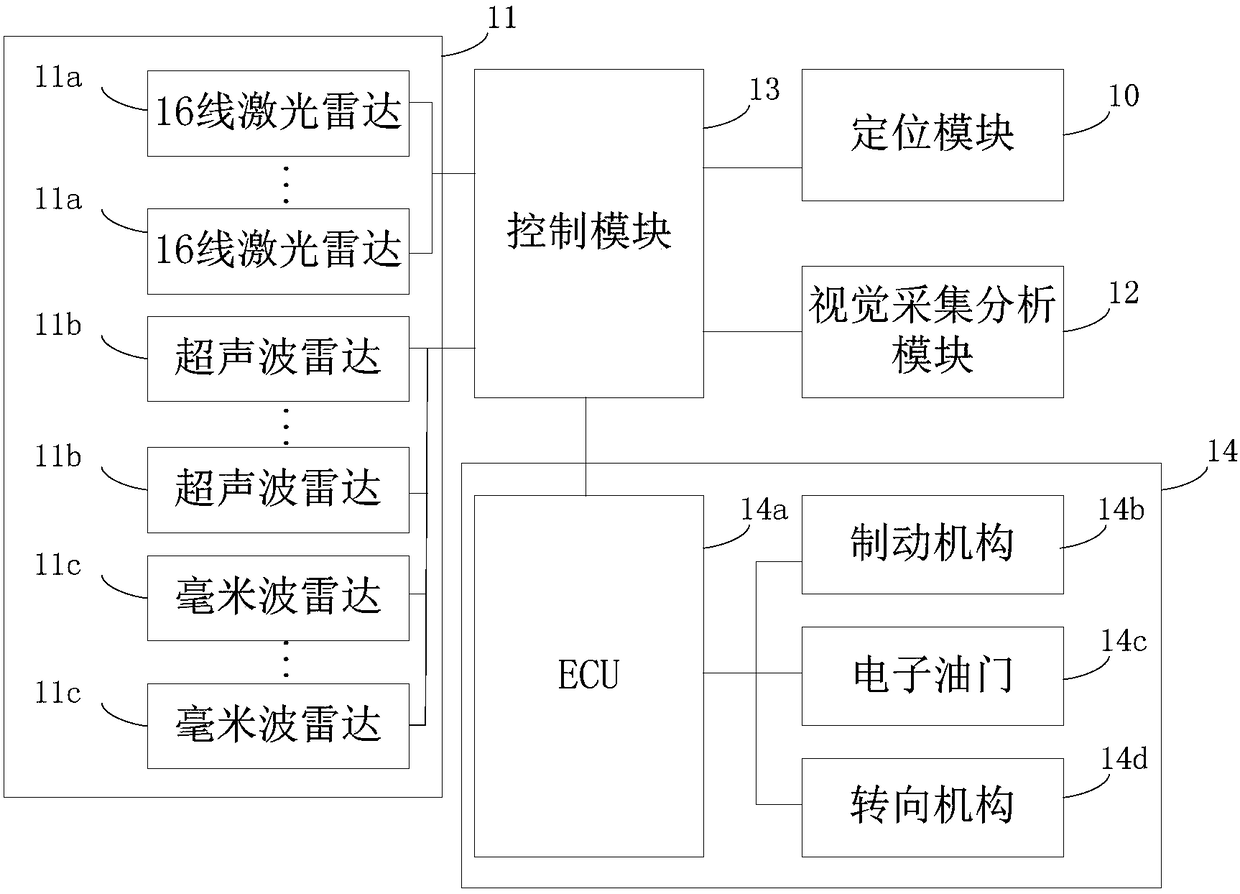
[0053] figure 1 It shows an automatic driving system applied to a road sweeper provided by an embodiment of the present invention. see figure 1 , the system includes a positioning module 10 , several radars 11 , a visual collection and analysis module 12 , a control module 13 and a bottom-level execution module 14 .
[0054] Wherein, the positioning module 10 is used for detecting the real-time position of the vehicle.
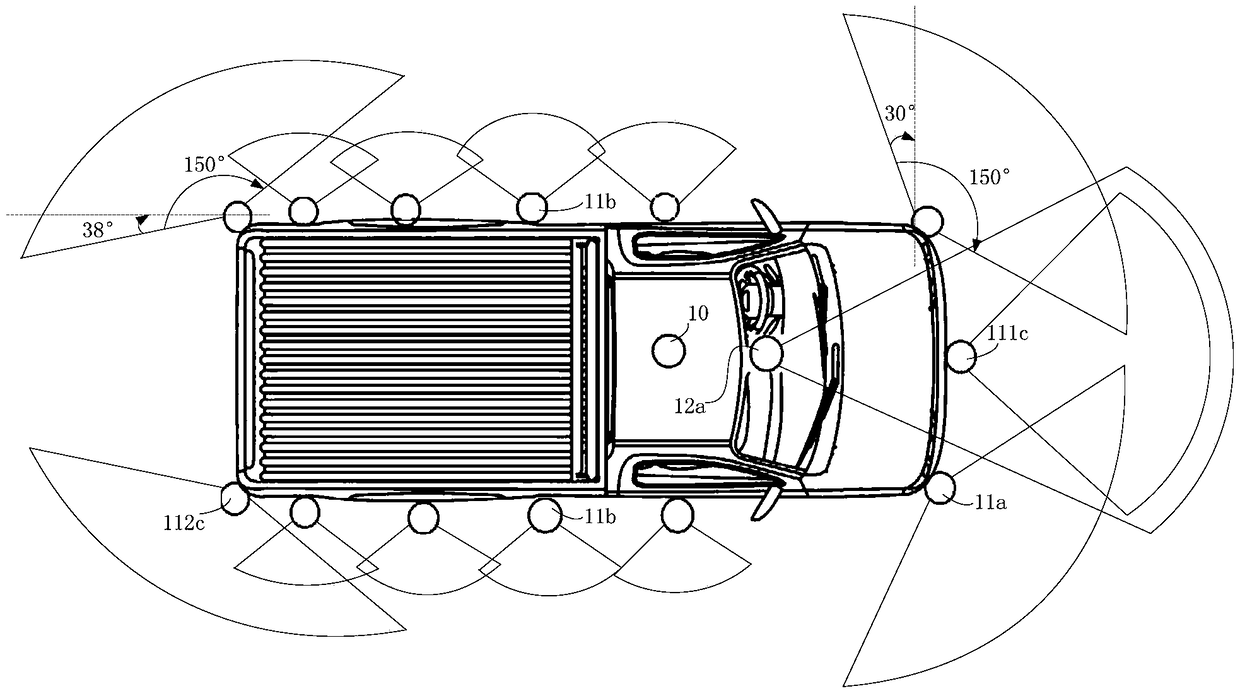
[0055] Among them, the several radars 11 may include several 16-line laser radars 11a, several ultrasonic radars 11b, and several millimeter wave radars 11c. For example, the several radars 11 include at least two 16-line laser radars 11a, at least eight ultrasonic radars 11b, and at least three millimeter wave rada...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More