Motor vehicle control device and method for determining avoidance trajectories for a collision-free avoidance manoeuvre of multiple motor vehicles
A technology for control devices and motor vehicles, applied in the direction of control devices, road vehicle traffic control systems, vehicle components, etc., can solve problems such as ignoring valuable operational feasibility solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0035] The exemplary embodiment described below is a preferred embodiment of the invention. In the case of this exemplary embodiment, the described components of the embodiment are accordingly individual features of the invention which are considered independently of one another, which correspondingly likewise develop the invention independently of one another and thus likewise individually or in a manner different from that described The combinations shown are considered to be part of the invention. Furthermore, the described embodiments can be supplemented by further already described features of the invention.
[0036] In the figures, functionally identical elements are correspondingly provided with the same reference symbols.
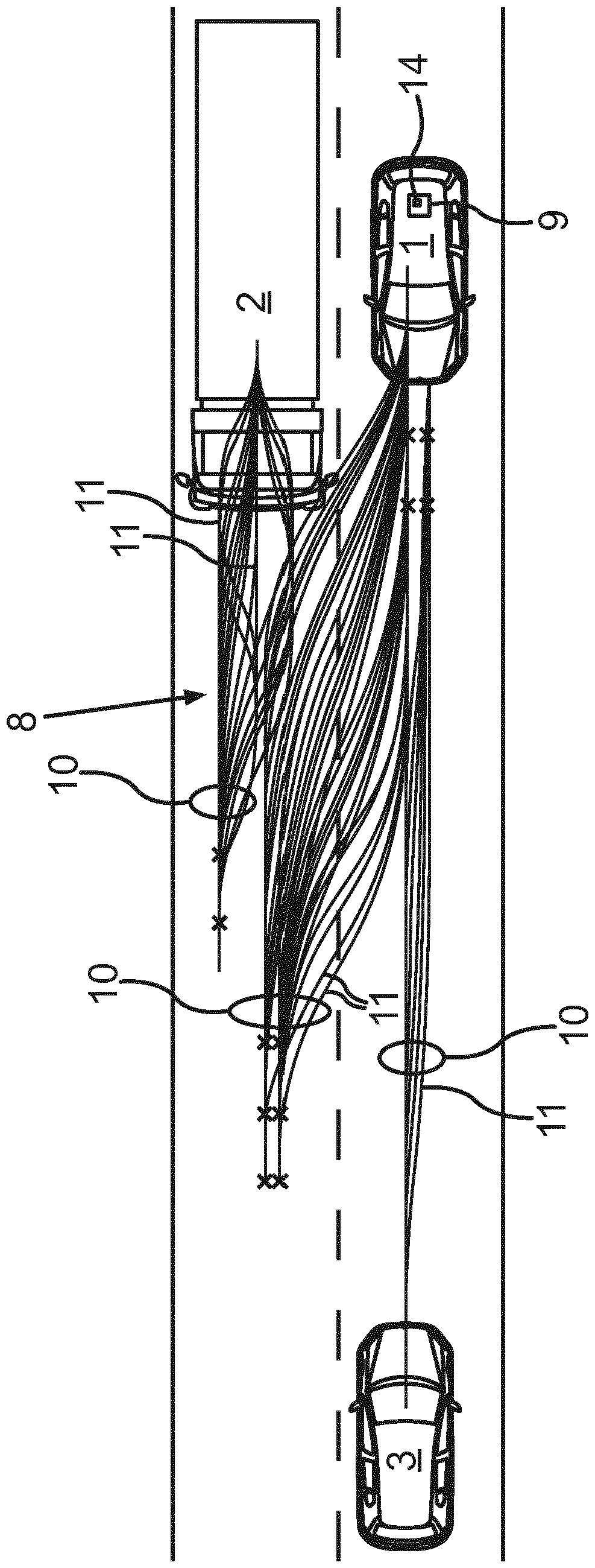
[0037] figure 1 Three motor vehicles 1, 2, 3 are shown as an example, wherein motor vehicle 1 overtakes motor vehicle 2 and for this purpose travels on the opposite lane 4 for which motor vehicle 3 is at a certain speed. Oncoming on the collision...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com