

Obstacle identification method for smart vehicles
An obstacle identification and intelligent vehicle technology, which is applied in the direction of using re-radiation, electromagnetic wave re-radiation, measuring device, etc., can solve the problem of not being able to obtain three-dimensional information, and achieve the effects of low computing cost, improved processing efficiency, and improved recognition efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
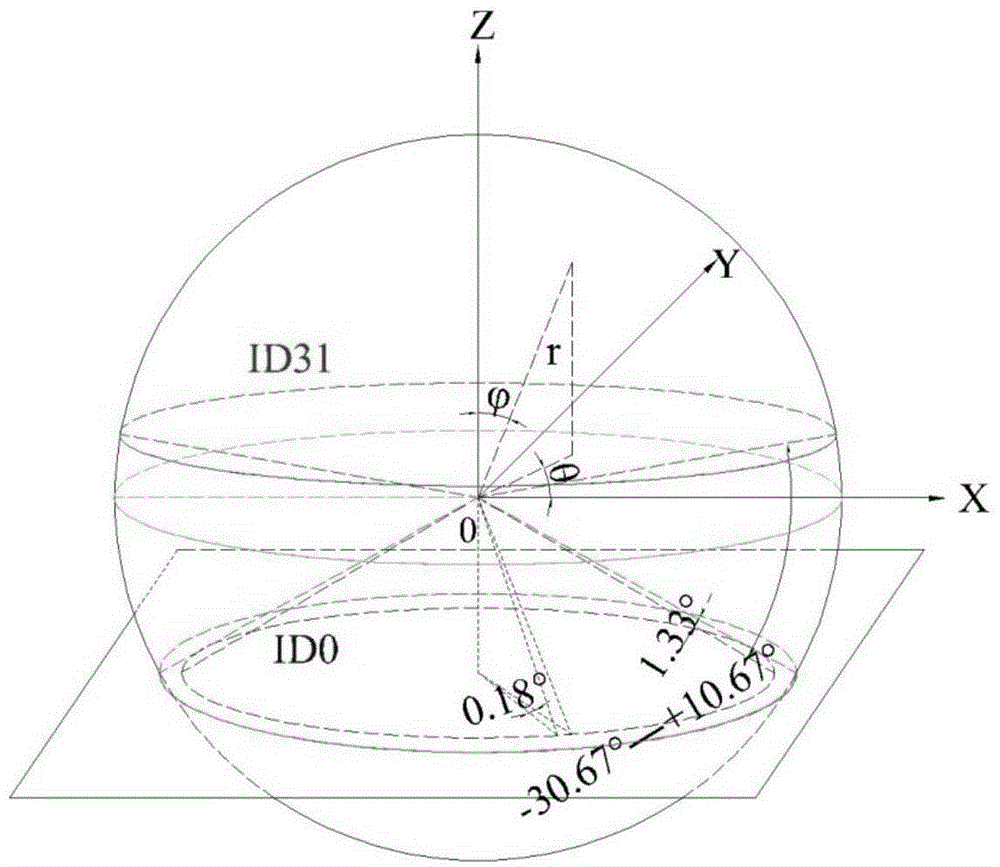
[0045] An obstacle recognition method for intelligent vehicles. In order to meet the real-time performance of intelligent driving obstacle identification, based on the spherical coordinates of the three-dimensional laser radar point cloud, firstly segment the obstacles in the driving environment of the intelligent vehicle, so that the obstacles Objects are separated from each other; and then the obstacles are classified to determine which type of pedestrians and vehicles the obstacles belong to.
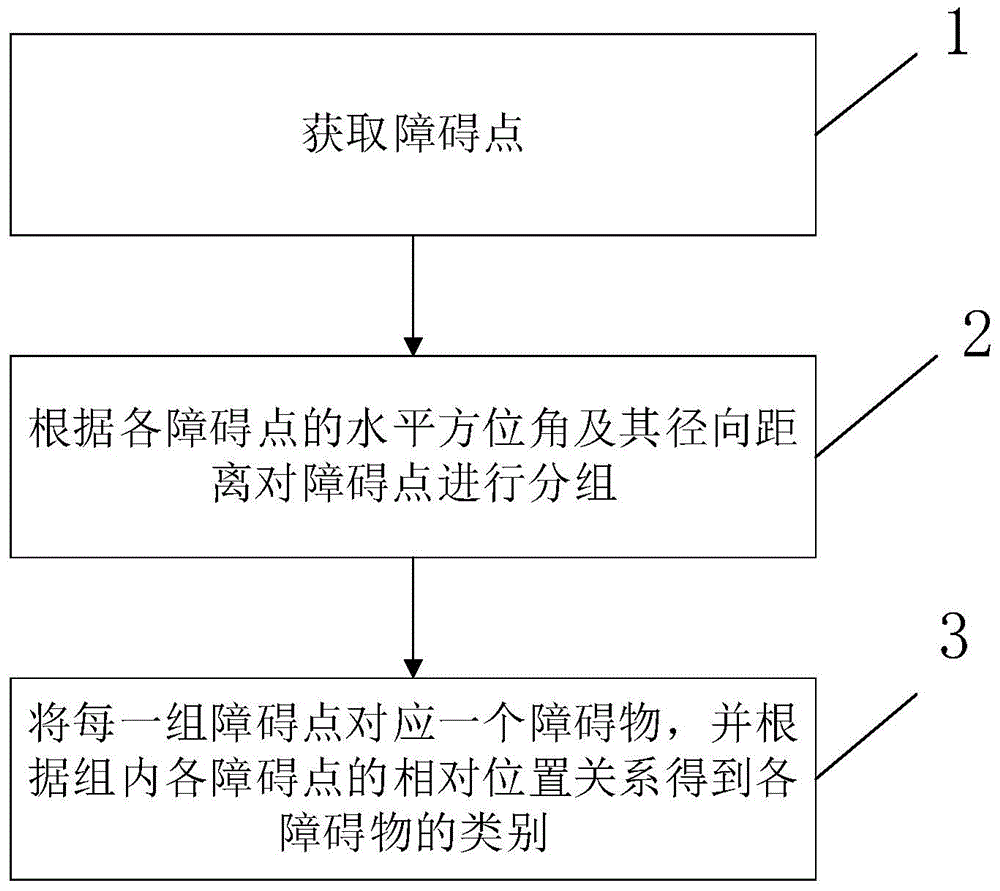
[0046] Such as figure 1 As shown, the obstacle identification method includes steps:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More