

Magneto-rheological force feedback type active-passive lower limb rehabilitation training device and control method
A technology of rehabilitation training and control method, which is applied in the direction of muscle training equipment, passive exercise equipment, sports accessories, etc., can solve the problems of inability to treat patients, secondary injury of lower limbs, less active/passive combination, etc., to improve the rehabilitation effect of lower limbs , The effect of restoring lower limb motor function and shortening the rehabilitation period
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
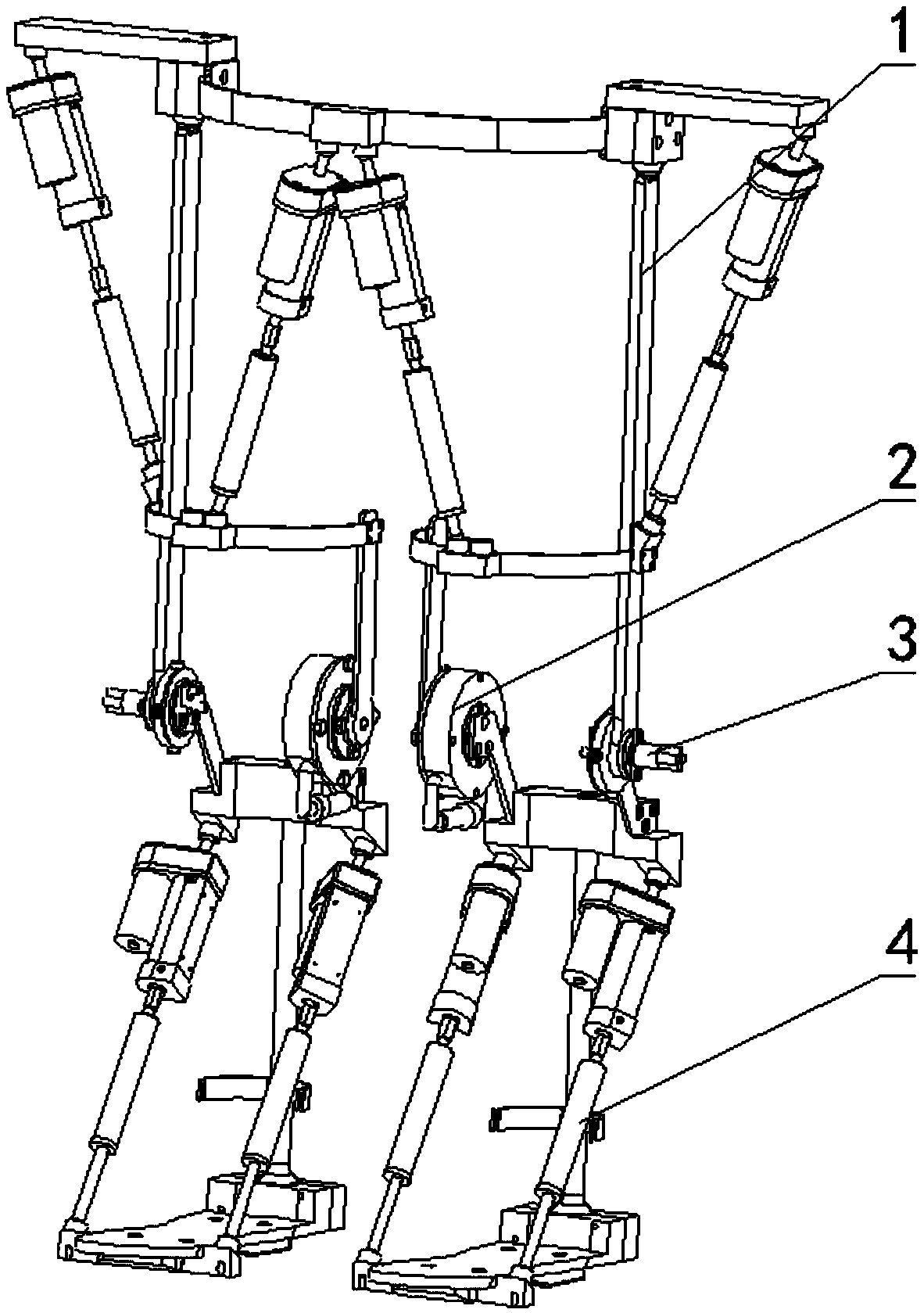
[0056] see figure 1 , a magneto-rheological force feedback type lower limb active and passive rehabilitation training device, comprising a left lower limb device and a right lower limb device, the left lower limb device and the right lower limb device are mirror symmetrical structures, and the left lower limb device includes a thigh mechanism 1, a knee A joint mechanism and a calf support mechanism 4 , the knee joint mechanism includes a rotary magneto-rheological damper 2 and a knee joint drive mechanism 3 .
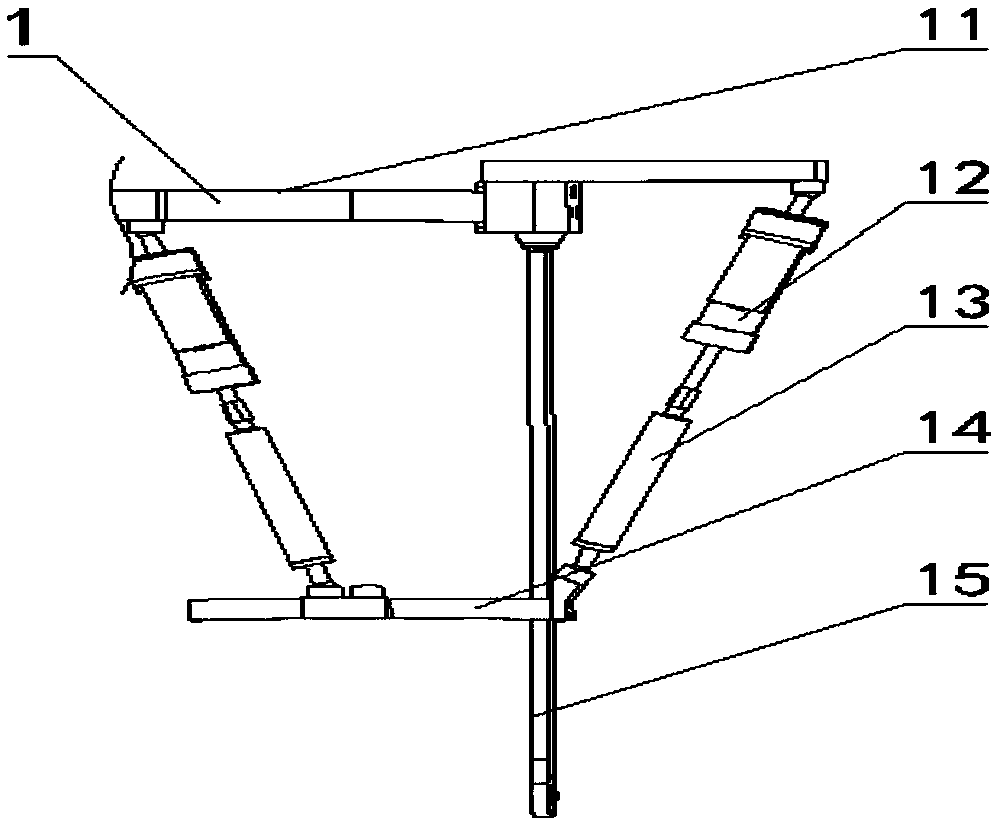
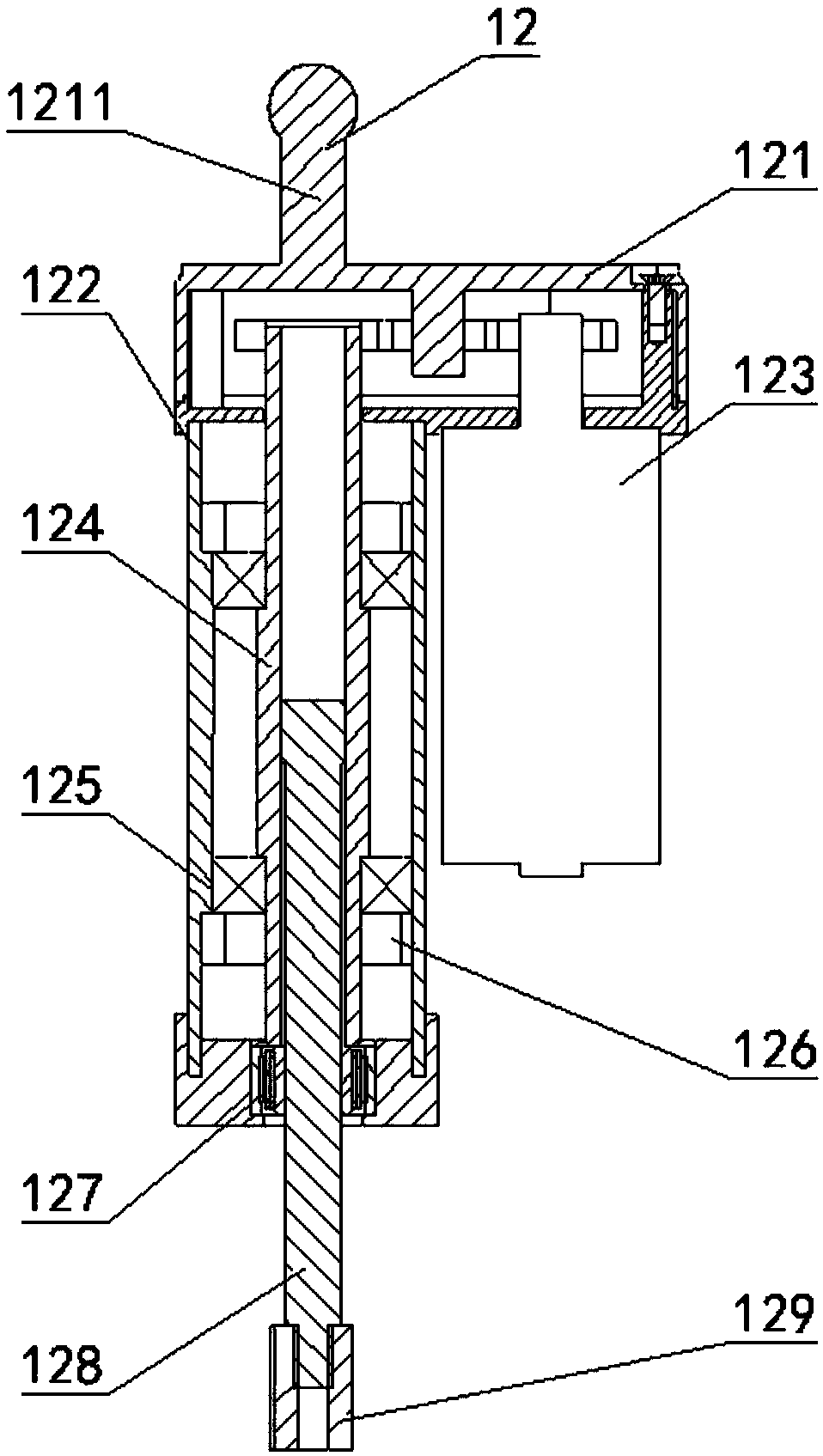
[0057] see figure 2 , the thigh mechanism 1 includes a waist fixing ring 11, two sets of first screw push rod devices 12, two sets of first linear magneto-rheological dampers 13, a thigh fixing ring 14 and a thigh outer support 15, and the waist fixing ring 11 Fixedly bandaged at the waist of the human body, the thigh fixing ring 14 is fixedly tied at the middle part of the human thigh, and a set of first screw push rod devices are respectively connected between the w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More