Disc type magnetorheological damper lower limb rehabilitation robot
A magneto-rheological damper and rehabilitation robot technology, applied in the field of medical instruments, can solve the problems of low motor output torque control accuracy, no installation safeguards for the human body, and inability to adjust resistance, etc., to achieve smooth and reliable transmission, good practicability, Easy to use effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention. Obviously, the described embodiments are part of the present invention Examples, not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
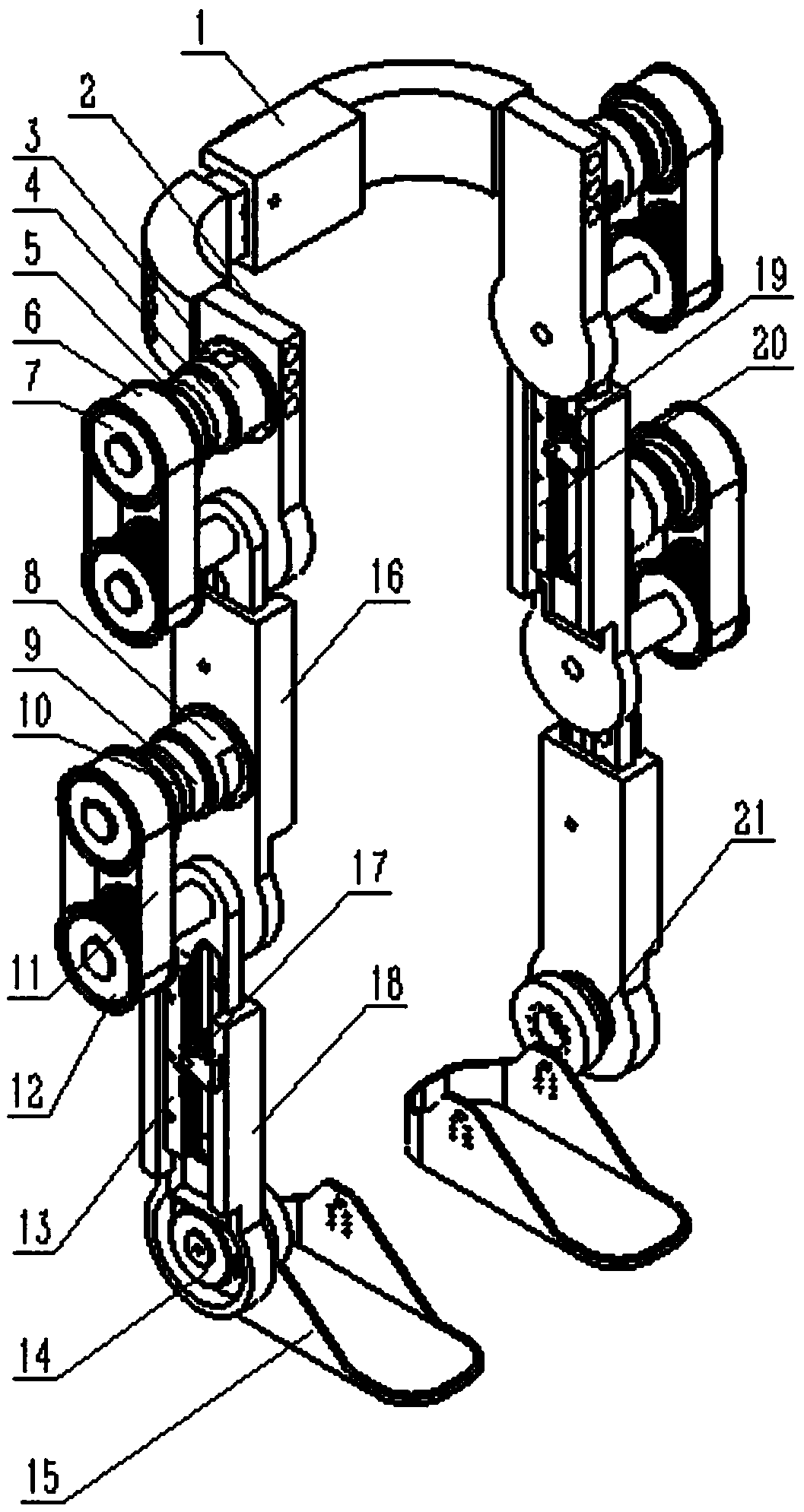
[0027] like figure 1 As shown, the structural relationship is as follows: the two ends of the waist rod 1 are arranged symmetrically, the top of the hip joint bracket 2 is fixedly connected to one end of the waist rod 1, and the hip joint bracket 2, the thigh rod 16, the calf rod 18 and the sole 15 are sequentially arranged from top to bottom. The hip joint motor 3, the knee joi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com