

Robot movement control method and device
A control method, robot technology, applied in the direction of non-electric variable control, motor vehicles, transportation and packaging, etc., can solve the problem of low safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0052] The robot movement control method and device according to the embodiments of the present invention will be described below with reference to the accompanying drawings.
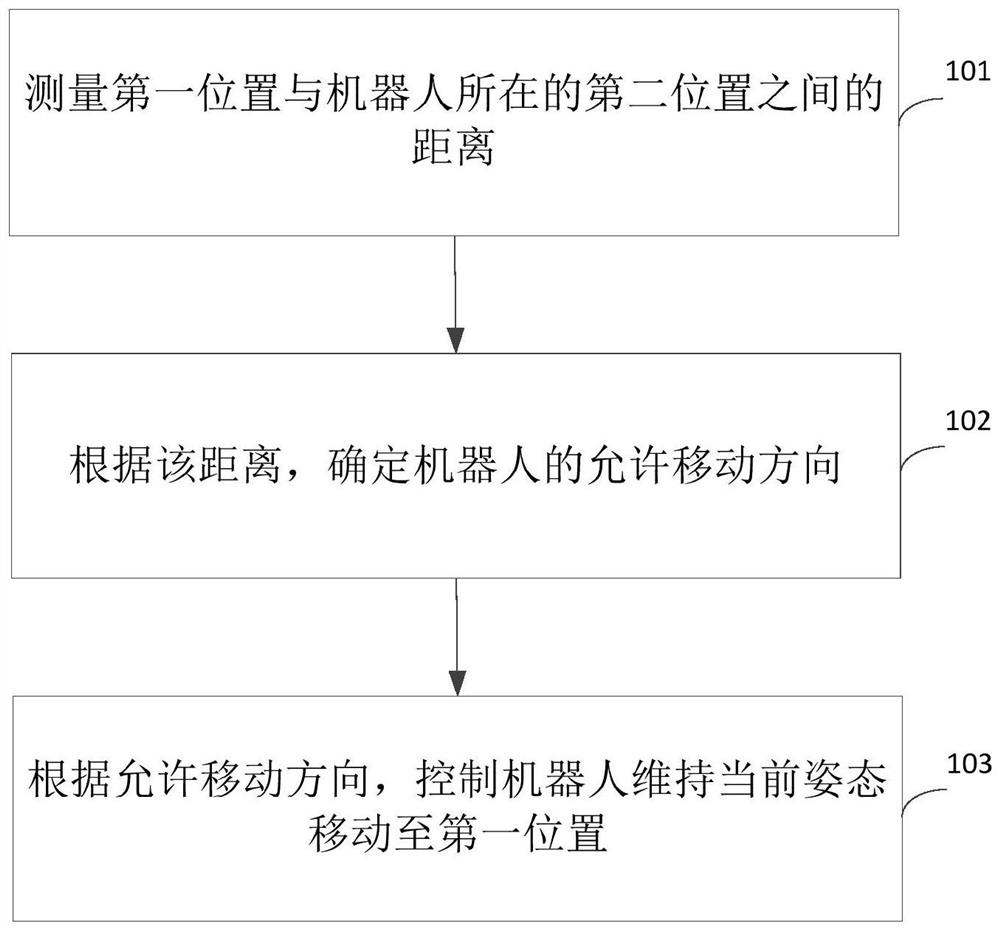
[0053] figure 1 It is a schematic flowchart of a robot movement control method provided by an embodiment of the present invention.
[0054] For an omnidirectional robot (hereinafter referred to as a robot), although the robot can move omnidirectionally, that is, realize omnidirectional walking without changing the posture of the robot, the sensors arrange...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More