

Method for judging traffic violation of stopping to yield by motor vehicle driver at intersection
A technology for drivers and motor vehicles, applied in the field of traffic engineering, can solve the problems of drivers breaking traffic laws and high risk of traffic accidents at intersections, and achieve the effects of reducing the risk and severity of accidents, promoting good travel behavior, and reducing the probability of traffic accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
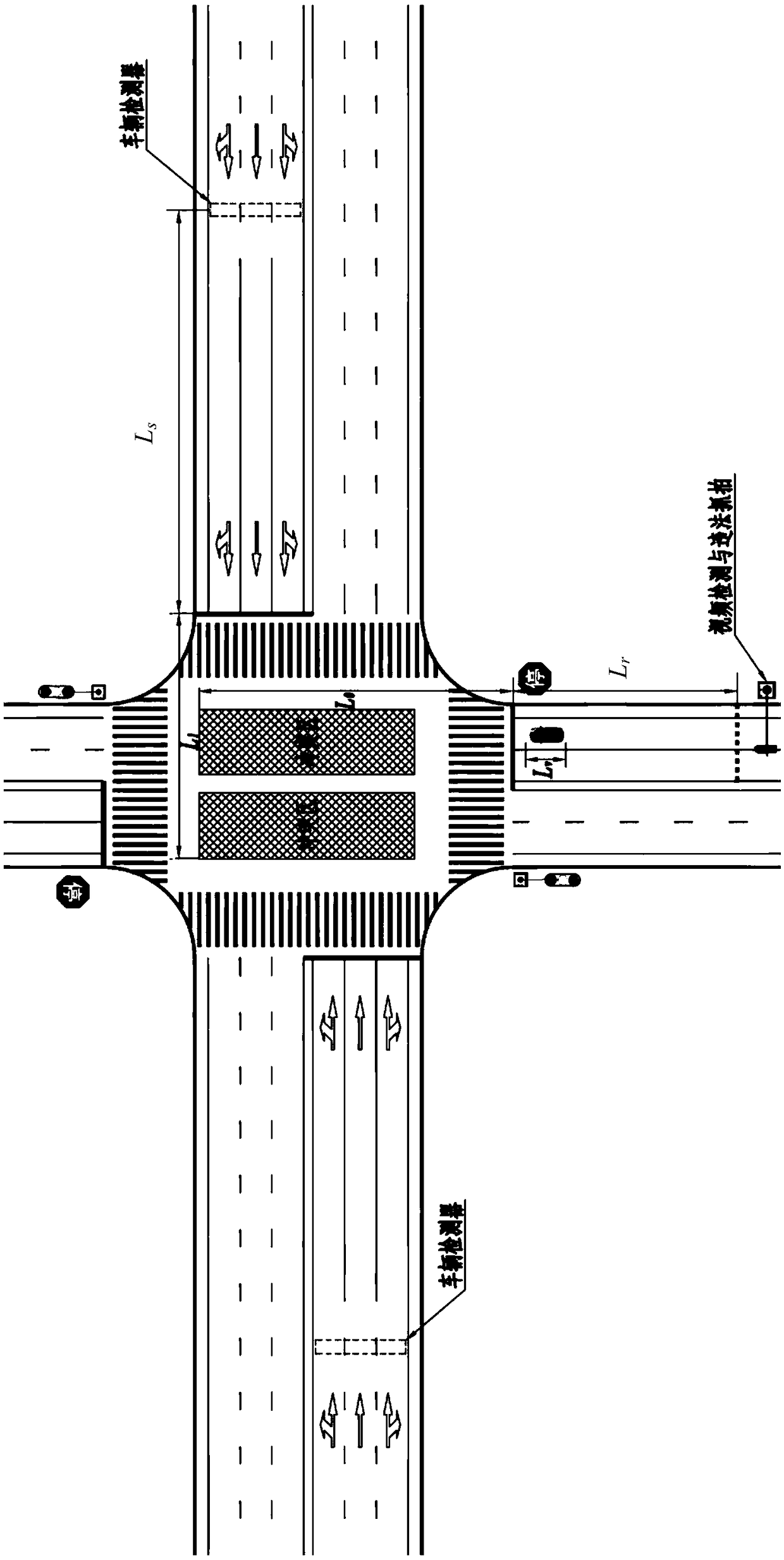
[0014] Specific implementation mode one: a method for judging the traffic violation of a motor vehicle driver at a stop and give way intersection includes the following steps:
[0015] The object of the present invention is achieved in that the vehicle detector (the road is hereinafter referred to as "the main road") is respectively arranged on the entrance road with the right of way at the intersection to detect whether there is a vehicle arriving and the time and speed of arrival; Install a video detector above the stop and give way entrance to judge whether the arriving vehicle actively slows down and stops. If it does not slow down and stop, it will start electronic capture to obtain evidence of its illegal behavior; at the same time, install a traffic signal opposite the stop and give way entrance , when no vehicle arrives at the entrance road with the right of way or there is a vehicle arriving but there is a large enough traversable gap, the signal light will display a g...
specific Embodiment approach 2
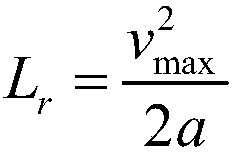
[0022] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is: the distance between the starting position of the parking and yielding detection area and the parking line is L r The calculation formula is:
[0023]
[0024] where v max is the speed limit value of the stop and give way road, a is the vehicle deceleration, and the value is 3.0~3.5m / s 2 .
[0025] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0026] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the specific process of determining the time required for the vehicle on the entrance road to stop and give way to cross the main road in the step two is:
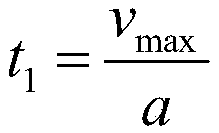
[0027] Let L be the distance between the parking line at the entrance to give way and the edge of the conflict zone farthest from the parking line 0 , the length of the car is L v , the target speed is the road speed limit v max , then the time t required to accelerate to the target speed 1 And the traveling distance S is:
[0028]
[0029]
[0030] Where a is the vehicle acceleration, the value is 3.0~3.5m / s 2 ;
[0031] When L 0 +L v When 0 for:
[0032]
[0033] where t 0 is the reaction time of the driver;
[0034] When L 0 +L v When ≥S, it means that the vehicle accelerates to the target speed and then goes through a period of constant speed running before completely passing the conflict ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More