

Fleet formation control device and formation control method based on information physical network
A cyber-physics and control device technology, applied in the field of fleet formation control devices, can solve problems such as implementation difficulties, it is difficult for the navigator to obtain the tracking error feedback of the follower, and the loss of global optimality, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
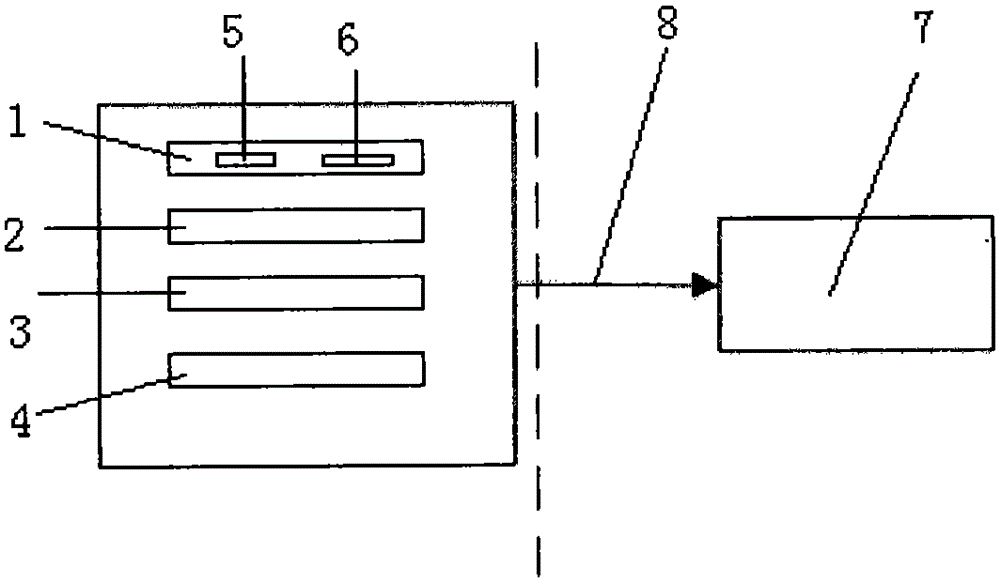
[0060]The embodiment of the present invention describes a cyber-physical network-based fleet formation control device, wherein the fleet includes a pilot vehicle R i and following vehicle R j . according to figure 1 The overall control block diagram of the cyber-physical network-based fleet formation control device is shown, and each vehicle R in the fleet is set i , R j The fleet formation control device on the vehicle includes a sensor module 1 outside the vehicle, a GPS positioning module 2, a wireless communication module 3 and a central processing unit module 4.
[0061] The sensor module 1 outside the vehicle includes an infrared sensor 5 for detecting obstacles in front and a speed sensor 6 for detecting the speed of the vehicle.
[0062] GPS positioning module 2 is installed in each vehicle R i , R j The middle position of the front end is used to collect the position information of the vehicle in real time and synchronize the time.
[0063] The wireless communi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More