

Road identification and path optimization AGV (automatic guided vehicle) based on machine vision and control system of AGV
A machine vision and control system technology, applied in control/adjustment systems, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of high construction cost of transportation rails, easy to be affected by the environment, and changing routes. Problems such as large engineering volume and capital consumption, to achieve the effect of ensuring safety and reliability, improving flexibility and obstacle avoidance ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
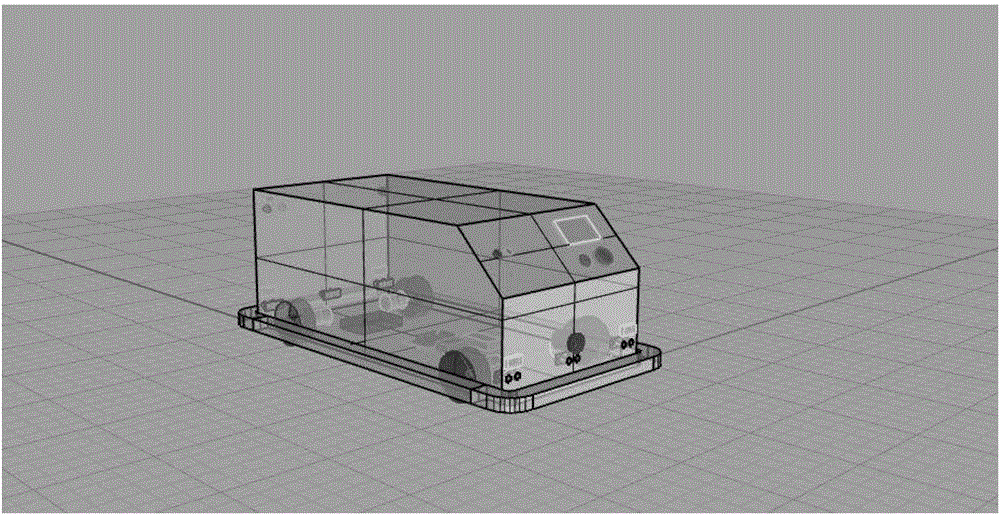
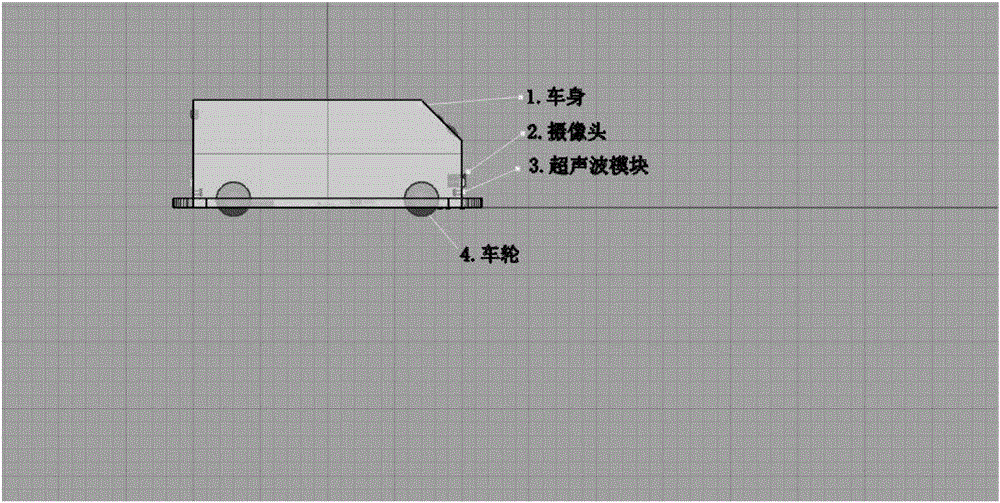
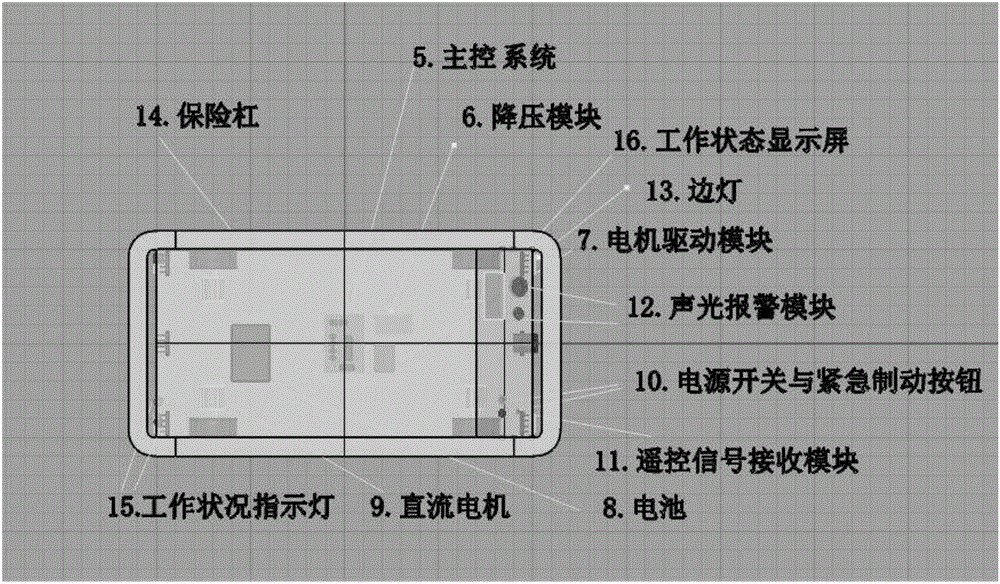
[0032] See figure 1 , 4 , The present invention is a multi-task AGV transport vehicle based on machine vision and optimal path selection, including body 1, camera 2, ultrasonic module 3, wheels 4 (including left front wheel 4.1, right front wheel 4.2, left rear wheel 4.3, right Rear wheel 4.4, each wheel contains a mother wheel and a child wheel. For details, please participate Figure 5 with Image 6 ), main control system 5, step-down module 6, motor drive module 7, battery 8, DC motor 9, power switch 10, remote control signal receiving module 11, sound and light alarm module 12, side light 13, bumper 14, working status Indicator light 15, working status display 16.
[0033] See figure 1 The camera 2 is installed in the lower part of the body 1 of the AGV transport vehicle, and the camera 2 is used to perform image preprocessing on the pictures acquired by the camera 2 using image processing technology to obtain the target linear feature points, and then perform image preproce...
Embodiment 2
[0039] The following reference Figure 1-4 Another embodiment of an AGV transport vehicle and its control system based on intelligent road recognition and route optimization based on machine vision is provided. The transport vehicle includes a body, a camera, an ultrasonic module, wheels, a main control system, a voltage reduction module, and a motor drive. Module, battery, DC motor, power switch, remote control receiving module, sound and light alarm module, camera, motor drive module, battery are placed in the upper part of the front of the car body, ultrasonic module, step-down module are placed in the lower part of the front of the car body, sound and light alarm module , The remote control receiving module and the power switch are located in the upper part of the rear of the vehicle body, and the main control system is located inside the vehicle body.
[0040] The work is done by pre-laying PA tapes with different paths divided by different colors or text and patterns in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More