

Intelligent networked four-wheel independent steering and independent driving electric vehicle emergency obstacle avoidance system
A four-wheel independent steering and independent driving technology, applied in the field of intelligent networked vehicle safety, can solve the problems of failure to consider the impact of surrounding traffic conditions and the possibility of obstacle avoidance, failure to consider the possibility of lane change and obstacle avoidance, etc. The effect of collision risk, improved obstacle avoidance, and reduced likelihood
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0141] The present invention will be further explained below in conjunction with the accompanying drawings.
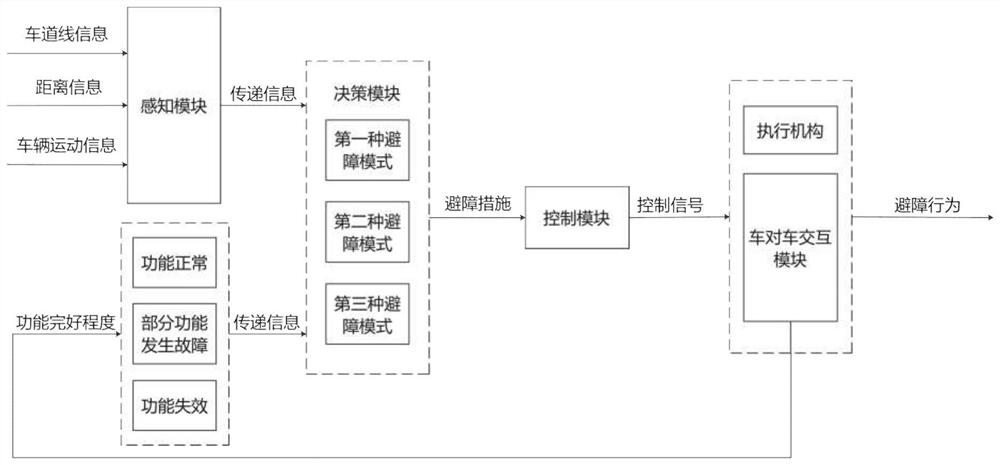
[0142] Such as figure 1 As shown, the whole system includes vehicle-to-vehicle interaction module, perception module, decision-making module and execution module; the decision-making module divides the emergency obstacle avoidance mode into the first obstacle avoidance mode, the second obstacle avoidance mode and the third obstacle avoidance mode model. The working principle of the whole system is as follows: the vehicle-to-vehicle interaction module realizes direct communication between vehicles and has the ability to receive and send basic vehicle data; In the obstacle avoidance mode, the vehicle-to-vehicle interaction module can assist or directly participate in the implementation of obstacle avoidance measures; in the first obstacle avoidance mode, the vehicle-to-vehicle interaction module can warn the vehicles behind in this lane to avoid rear-end collisions; In...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More