

Obstacle avoiding path planning method and system in specific path
A technology for specifying paths and path planning, applied in control/adjustment systems, two-dimensional position/channel control, vehicle position/route/altitude control, etc. Quickly wait for the problem to achieve the effect of reducing the risk of pedestrian collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 3
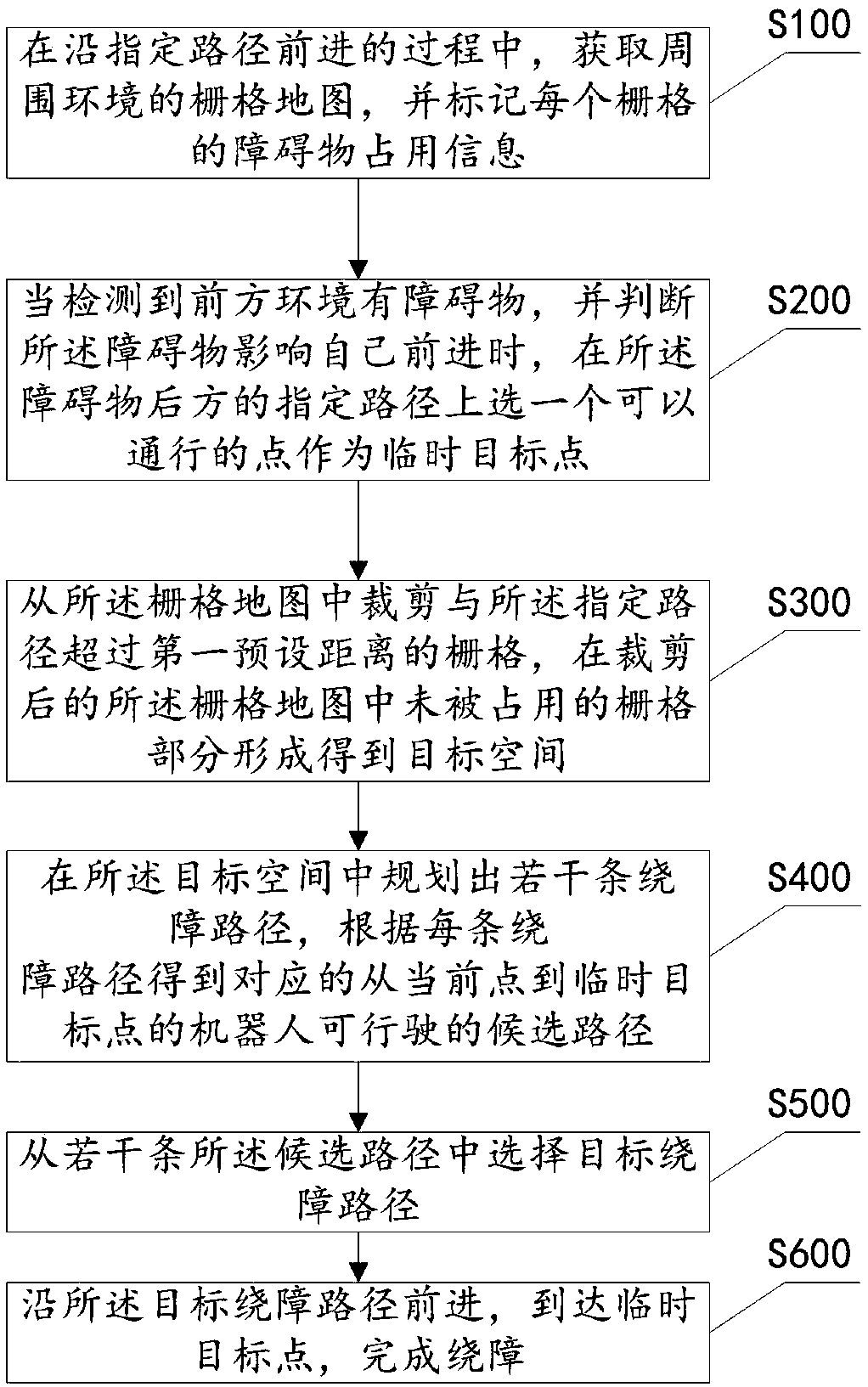
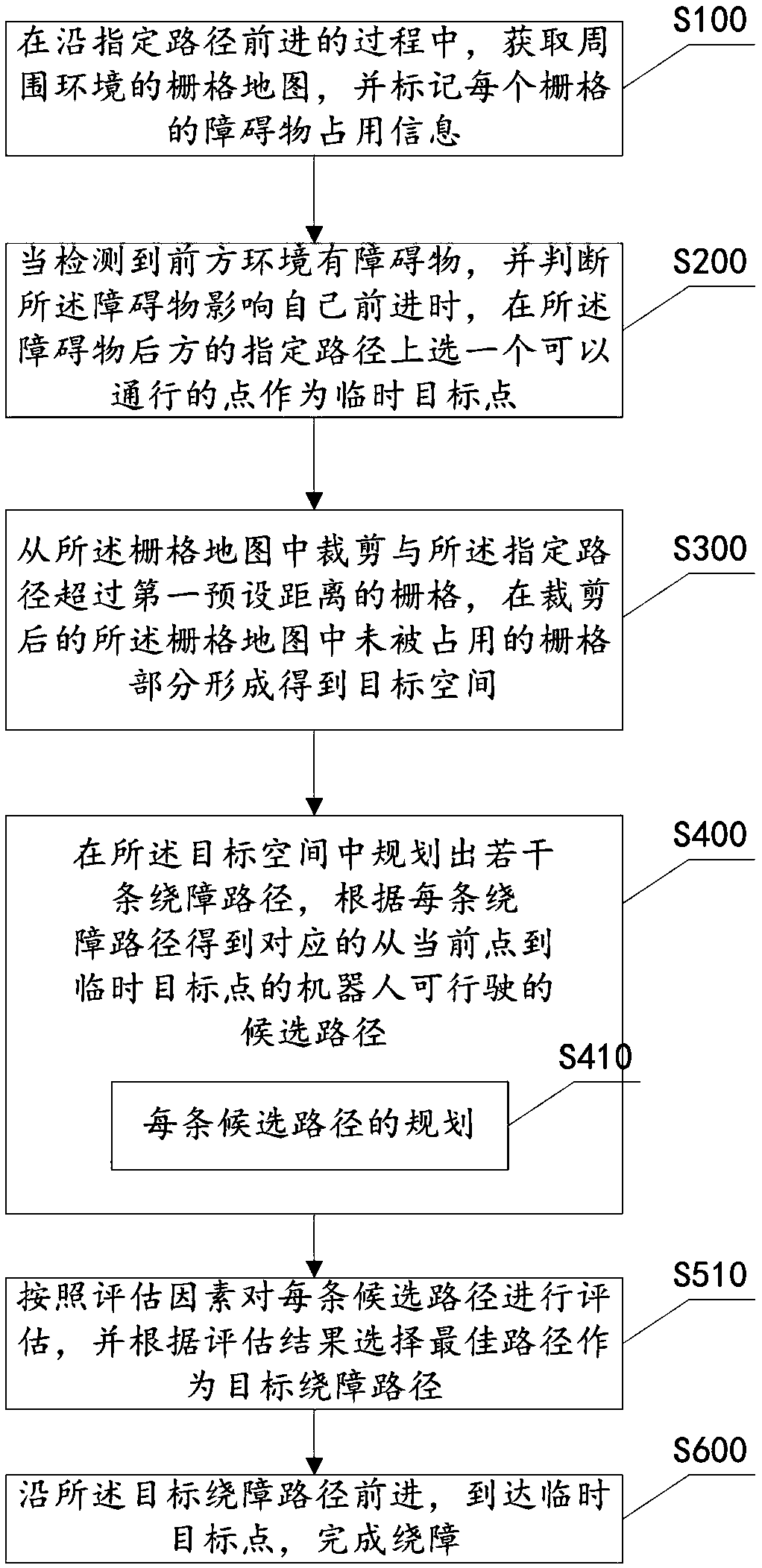
[0077] Specifically, "the grid that is not within the preset obstacle-free range from the obstacle" means that the distance between the grid and the edge of the obstacle is not within the preset obstacle-free range, and this part of the grid needs to be clipped. Example 1, the preset obstacle-free range is no more than 5cm, then the grids with a distance of more than 5cm from the edge of the obstacle are not within the preset obstacle-free range and need to be clipped; Example 2, the preset obstacle-free range is If it is not more than 5cm and not less than 2cm, the grid whose distance from the edge of the obstacle falls between 2 and 5cm is a qualified grid, and other grids must be clipped. Example 3, the default obstacle separation range is not less than 2cm, then the grids whose distance from the edge of the obstacle is less than 2cm need to be clipped.
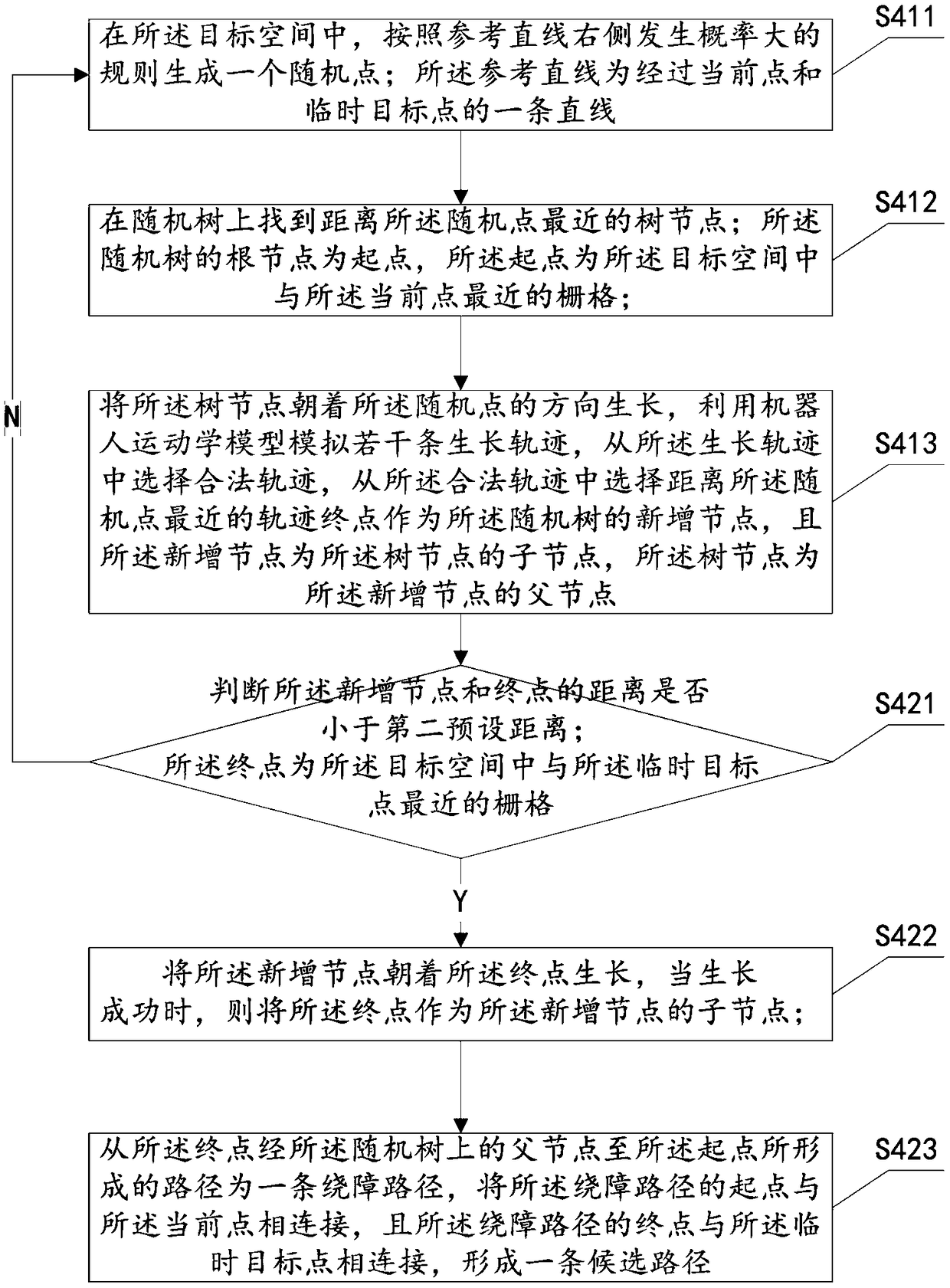
[0078] In this embodiment, the target space may or may not contain the current point or the temporary target point, depe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More