

A Method of Improving the Accuracy of Inertial-Geomagnetism Combination Dynamic Attitude Determination
A geomagnetic and precision technology, applied in the field of sensors, can solve the problems of inertia-geomagnetism combined attitude calculation accuracy drop, carrier linear acceleration interference, etc., to achieve the effect of improving dynamic attitude calculation accuracy, suppressing influence, and improving dynamic attitude determination accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0066] The present invention will be described in detail in conjunction with accompanying drawing now. This figure is a simplified schematic diagram only illustrating the basic structure of the present invention in a schematic manner, so it only shows the components relevant to the present invention.
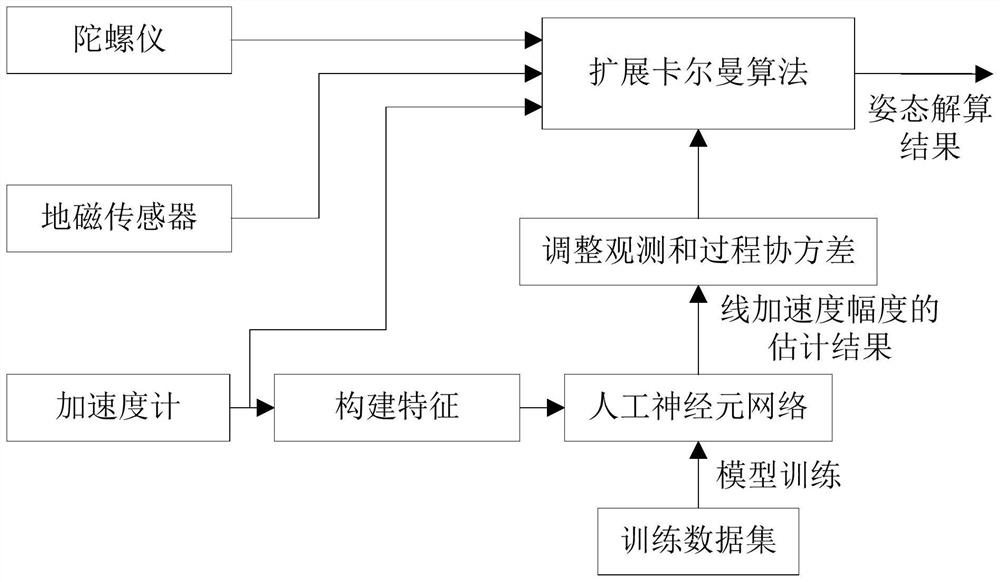
[0067] Such as figure 1 As shown, the method for improving the inertial-geomagnetic combination dynamic attitude determination accuracy based on the artificial neuron network proposed by the present invention for suppressing the influence of the linear acceleration of the carrier, the basic idea of the method is to use the artificial neuron network as the output and extension of the accelerometer The bridge between the process noise of the Kalman algorithm and the covariance of the observation noise, in order to adjust the latter adaptively through the former, so as to achieve the purpose of suppressing the carrier linear acceleration interference. Among them, the three-axis a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More