

Four-axis linkage mechanical arm for feeding and stamping
A manipulator and feeding technology, which is applied in metal processing equipment, feeding devices, manufacturing tools, etc., can solve problems such as unstable rotation of the long-arm feeding shaft, cumbersome equipment maintenance and overhaul, and unreasonable setting of the rotating mechanism. The effect of high degree of optimization, ingenious structure and low center of gravity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below through the accompanying drawings and embodiments. However, it should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the scope of the present invention.
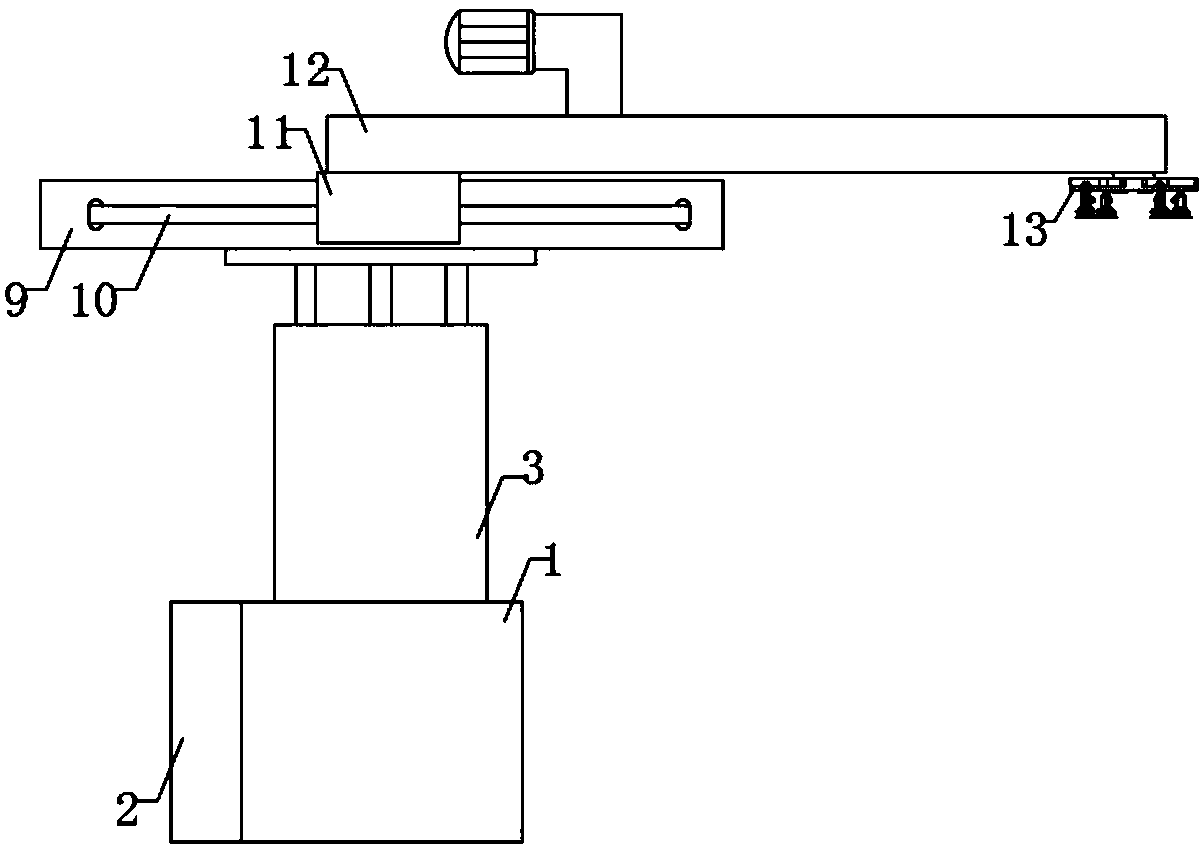
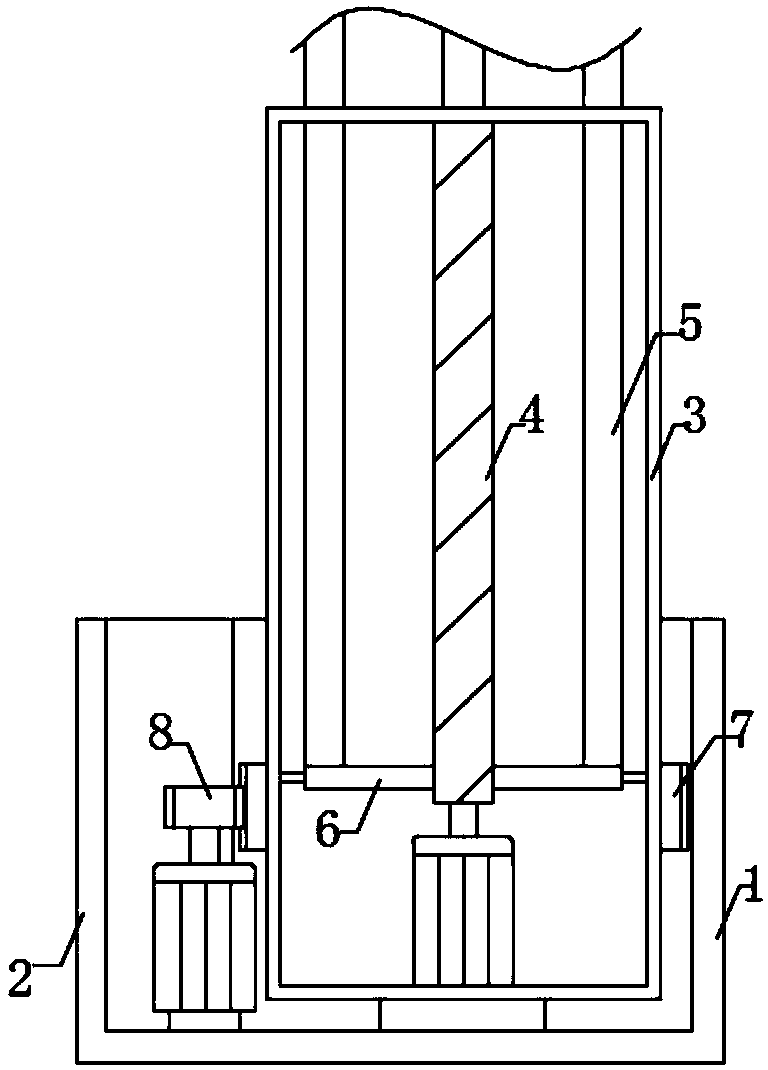
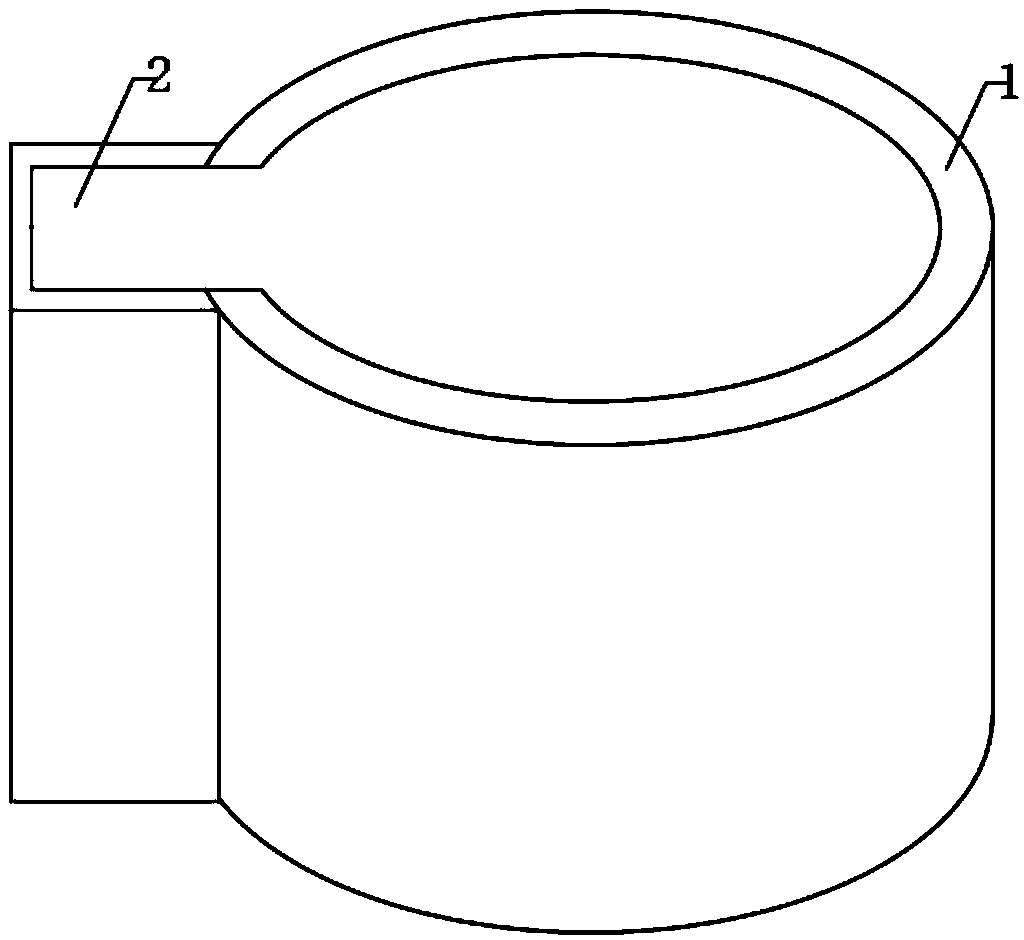
[0035] see Figure 1-6 , the present invention provides a technical solution: a four-axis linkage manipulator for feeding and punching, including: an electromagnetic chuck 13, an installation cylinder 1, and an axial mechanism and two axial mechanisms located in the installation cylinder 1, and the installation cylinder The center of 1 is provided with a rotation axis, one axial mechanism drives the electromagnetic chuck 13 to move vertically, and the second axial mechanism drives the electromagnetic chuck 13 to rotate around the rotation axis of the installation cylinder...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More