

Manipulator
A technology of manipulators and linear motors, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of unable to meet the requirements of grasping force, reduced degree of freedom of movement, and inability to store and transport goods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
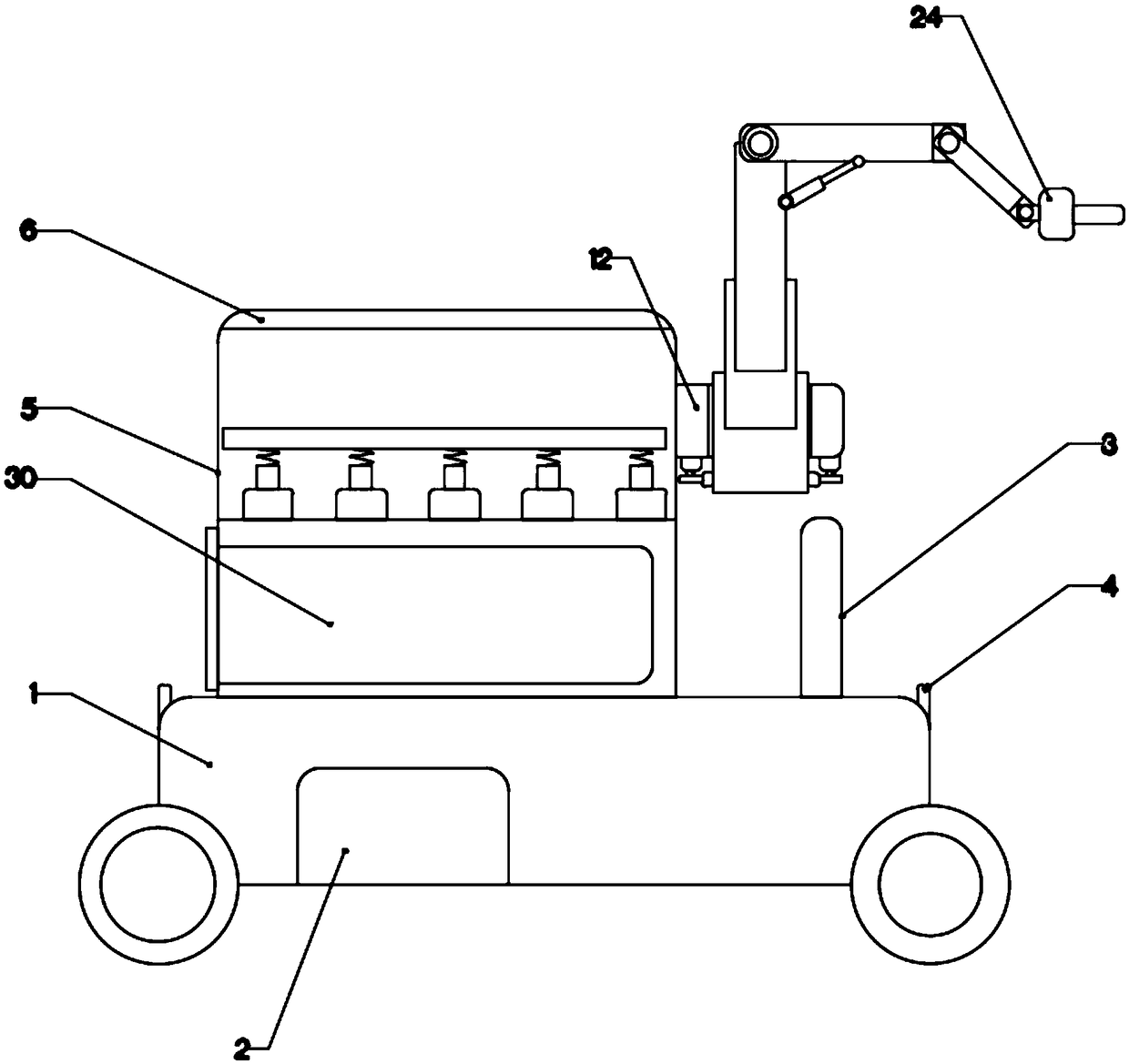
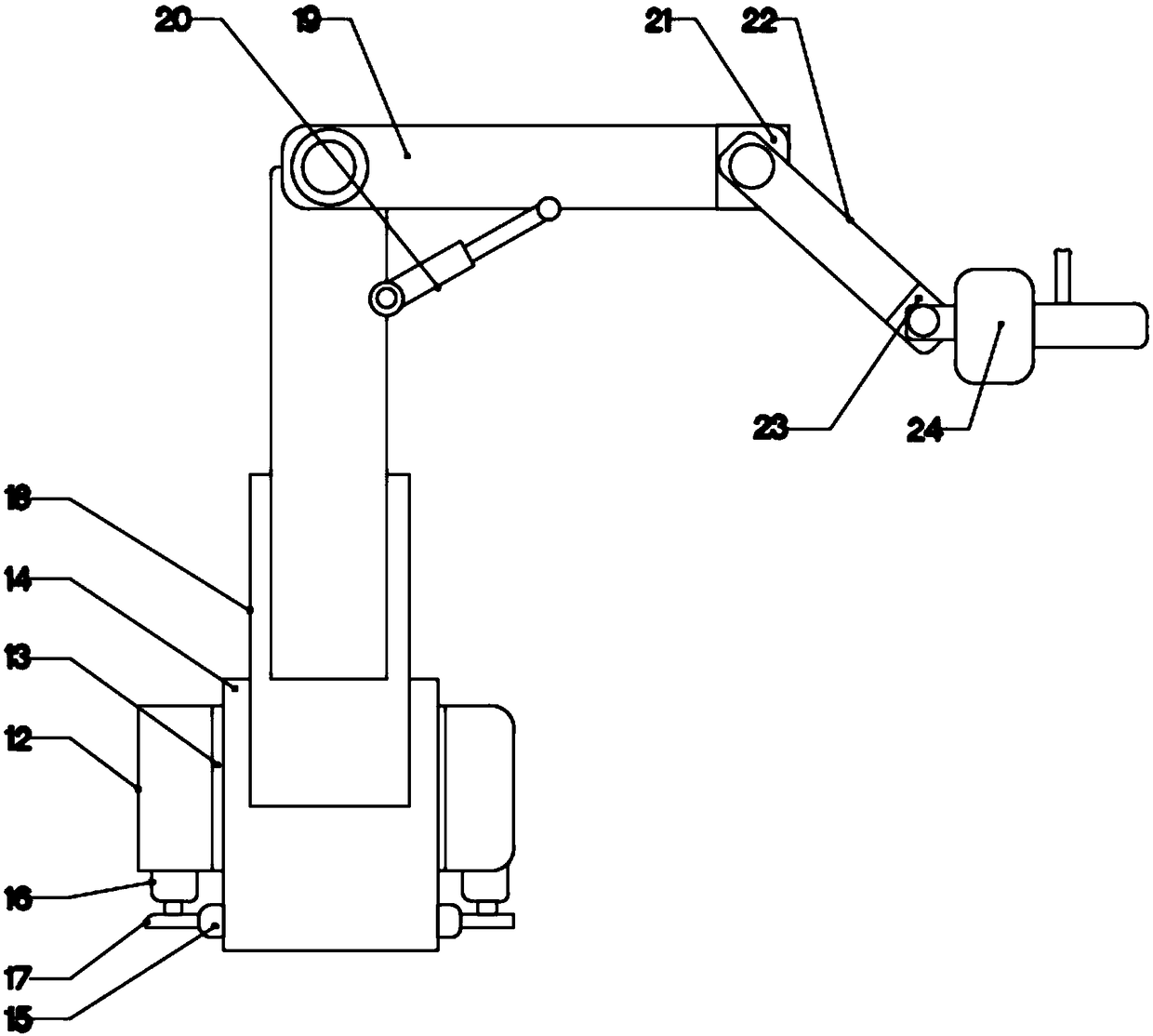
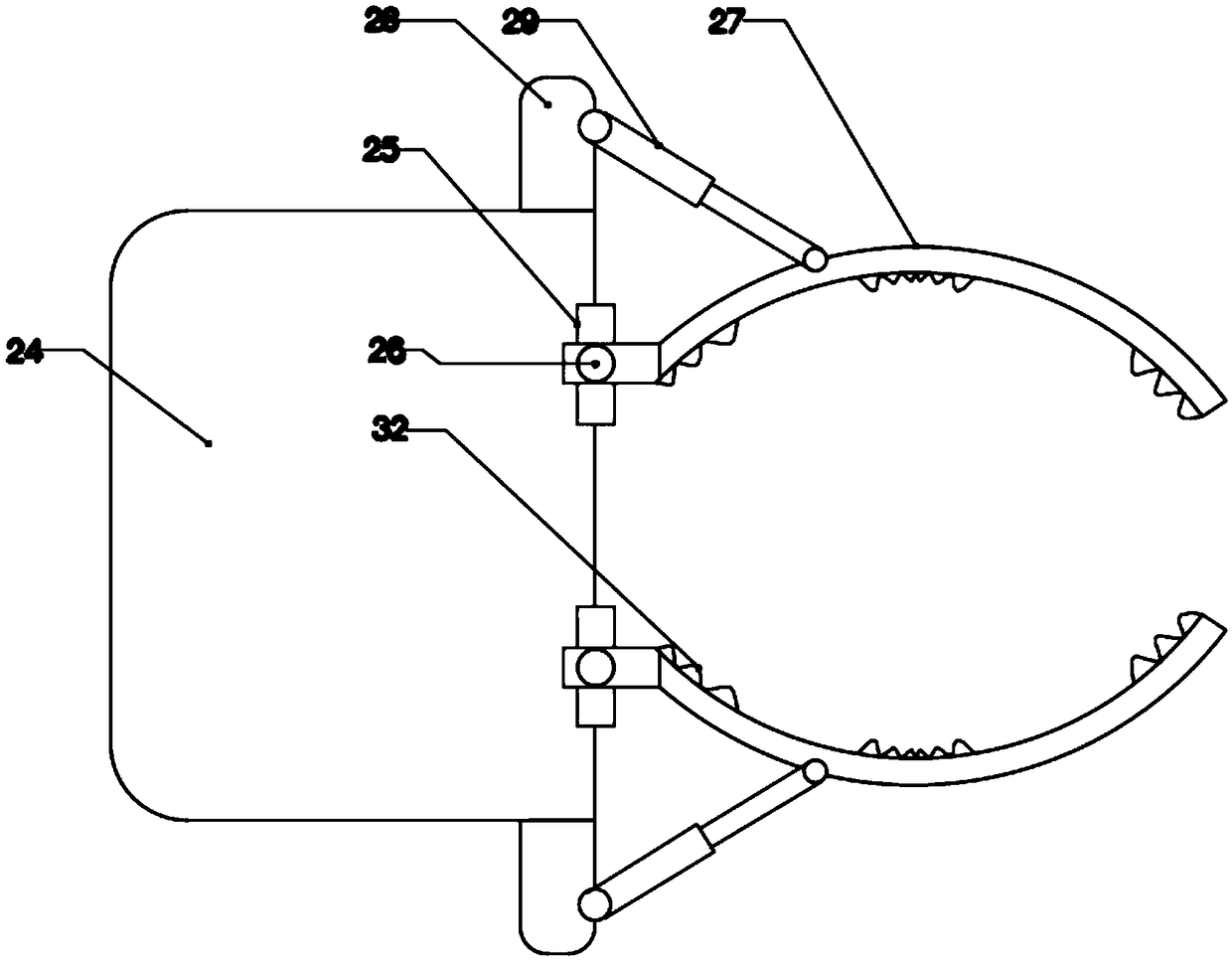
[0020] The present invention is specifically described below in conjunction with accompanying drawing, as Figure 1-4 shown.
[0021] In this embodiment, through the function of the buffer device, the vibration transmitted from the ground can be reduced when the goods are stored, and finally the stability of the goods can be stabilized. Through the action of the supporting device, the moving range of the grabbing device can be made wider, thereby facilitating the moving of the goods. The object can be moved more accurately through the action of the grasping device.
[0022] In the first step, the battery 2 provides power for the electrical appliances of the entire device, and the controller 3 controls the moving wheel 31 to move to a certain position. When it moves to a designated position, the controller 3 controls the rotating motor 16 on the lower surface of the fixed plate 12 to rotate , the rotating end of the rotating motor-16 directly drives the entire electronic tele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More