

A multi-group robot cooperative control method and control system based on reinforcement learning
A technology of group robot and cooperative control, applied in the direction of control/regulation system, two-dimensional position/channel control, non-electric variable control, etc., can solve the problem of multi-group robot algorithm difficult to efficiently avoid information interaction, etc., to improve navigation efficiency , the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
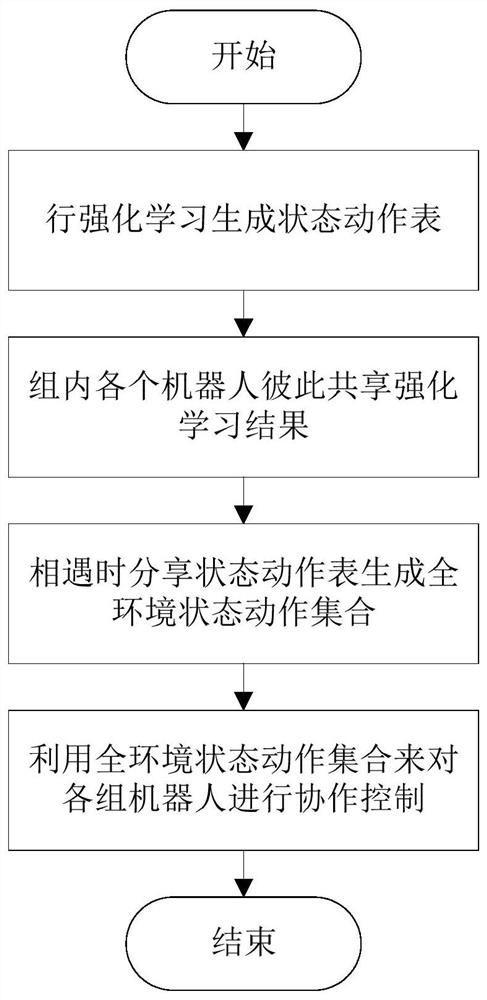
[0048] Such as figure 1 As shown, the multi-group robot cooperative control method based on reinforcement learning provided by the present invention includes the following steps:
[0049] Step 1. Rasterize the environment of the robot to obtain the environment grid, so that the channel information is converted into a finite state set, and each group of robots performs intensive learning on the environment according to the finite state set to generate a state action table;
[0050] Step 2, each robot in the group shares reinforcement learning results with each other;
[0051] Step 3: Avoidance control is performed when the robots in the groups meet, and the state-action table in each group is shared to determine the action selected by the robot in the current state, thereby further generating a set of state-actions in the entire environment;
[0052] Step 4, use the generated action set of the whole environment state to carry out collaborative control on each group of robots. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More