

Slide rail guided suction cup retractable worm-like wall-climbing robot device
A technology of wall-climbing robots and suction cups, which is applied in the field of wall-climbing robots, can solve the problems of many degrees of freedom in the system, difficult control, and insufficient load, and achieve the effects of long battery life, large contact area, and good scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
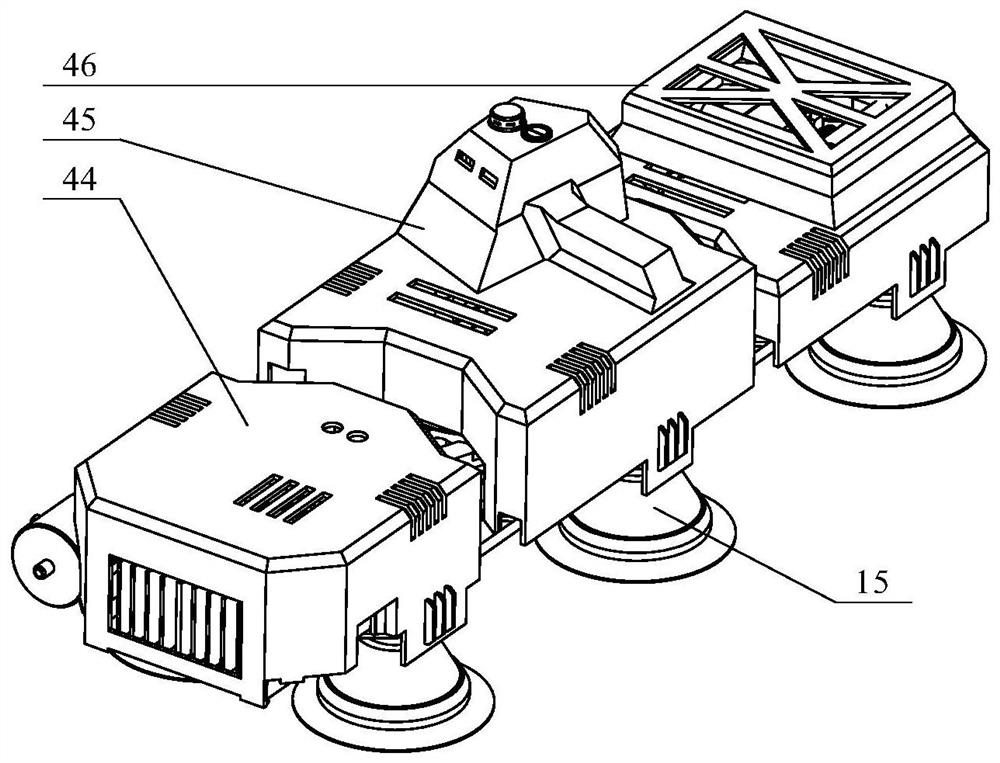
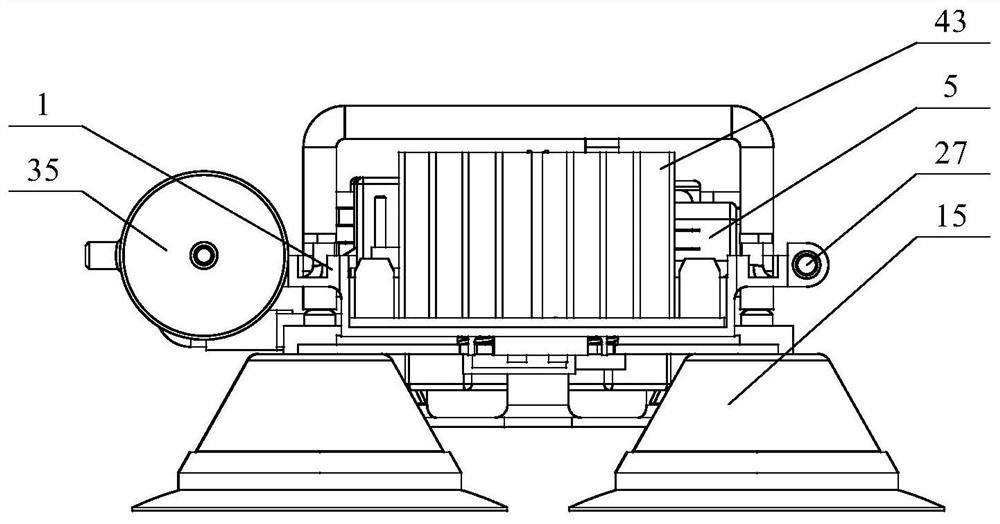
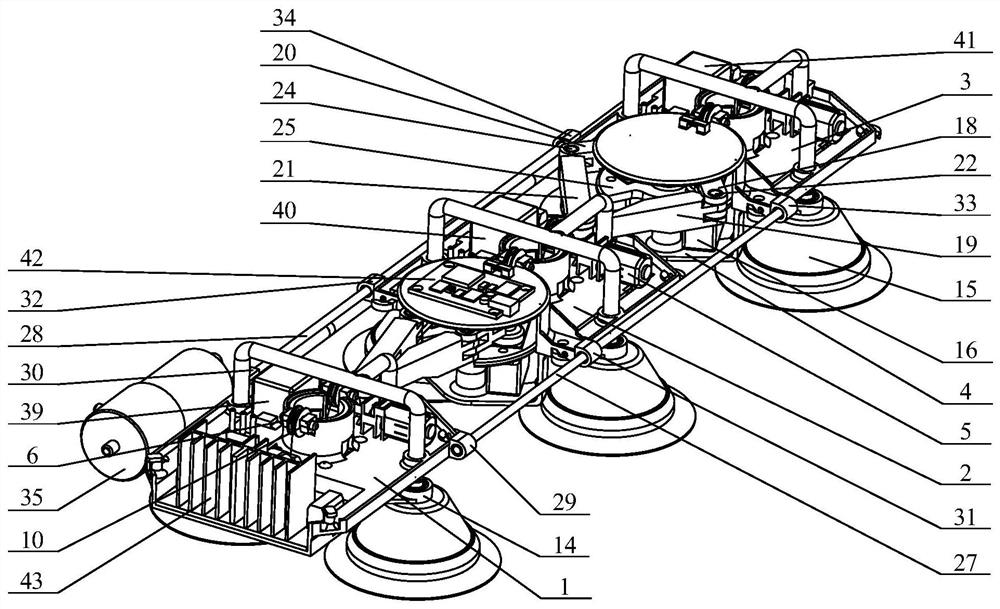
[0043] A kind of embodiment of the flexible worm-like wall-climbing robot device of the sliding rail guide sucker design of the present invention, as Figure 1 to Figure 6 As shown, it includes the first adsorption unit 1, the second adsorption unit 2, the third adsorption unit 3, the first telescopic link assembly, the second telescopic link assembly, the first guide shaft 27, the second guide shaft 28, the first Left slider 29, first right slider 30, second left slider 31, second right slider 32, third left slider 33, third right slider 34, electric air pump 35, first electromagnetic valve 36, The second solenoid valve 37, the third solenoid valve 38, the first relay 39, the second relay 40, the third relay 41 and the controller 42; the first adsorption unit 1, the second adsorption unit 2 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More