

Motion planning and control method for wall climbing and crossing of underwater hexapod robot
A technology for hexapod robots and underwater robots, which can be used in non-electric variable control, height or depth control, control/regulation systems, etc., and can solve problems such as poor adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0111] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
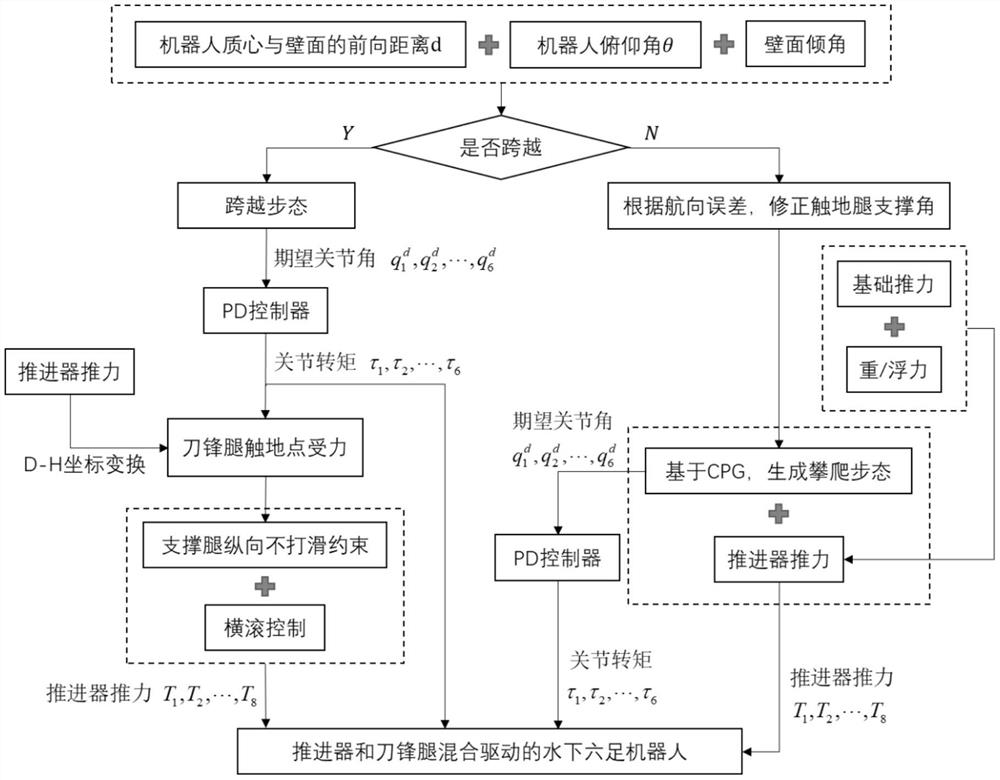
[0112] figure 1 It is a schematic diagram of the motion planning and control method of a hybrid-driven underwater hexapod robot wall climbing and crossing. First, according to the forward distance d between the center of mass of the underwater hexapod robot and the wall and the pitch angle θ of the underwater hexapod robot and the inclination angle of the current wall k The error between, set the switch signal c representing the gait switching 1 、c 2 , choose to adopt a climbing gait or a striding gait. Aiming at climbing gait, heading error is introduced into the design of the support angle of the blade leg to achieve directional control; in addition, in order to ensure that there is enough positive pressure between the blade leg and the ground so that the blade leg does not slip, a certain basic thrust is set, and at the same time due to water When the und...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More