

Return control method and device of unmanned aerial vehicle and unmanned aerial vehicle
A technology of a control method and a control device, which is applied in the field of drones, drone return control methods, and devices, can solve problems such as aircraft GPS positioning accuracy errors, GPS multi-path interference, and drone landing, and achieve accurate return. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
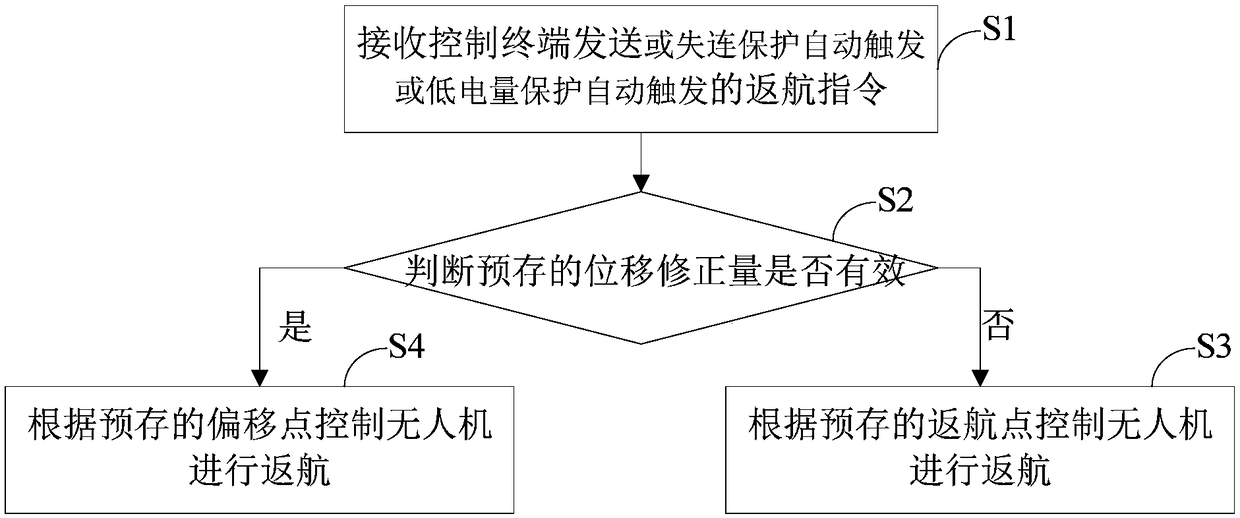
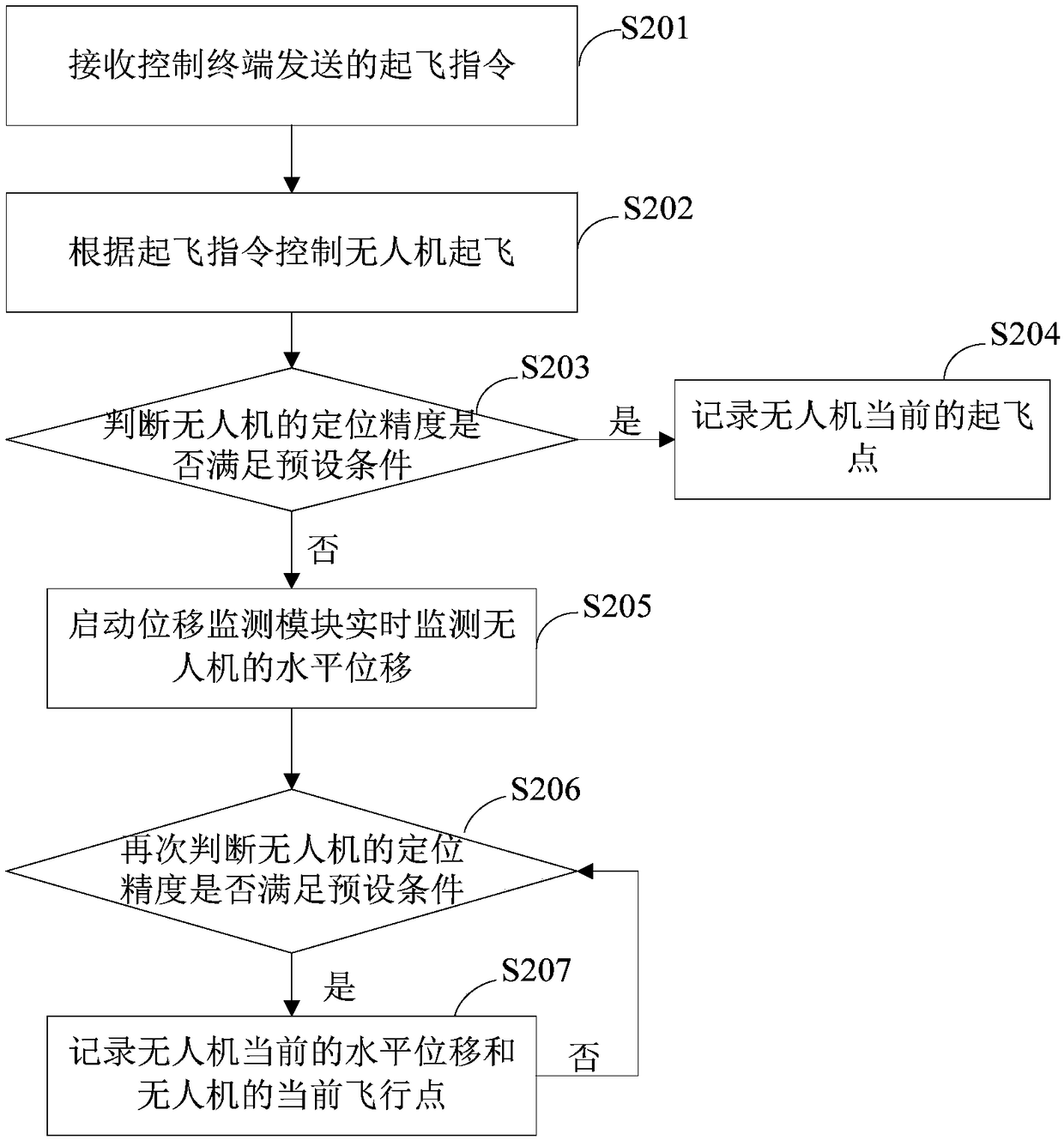
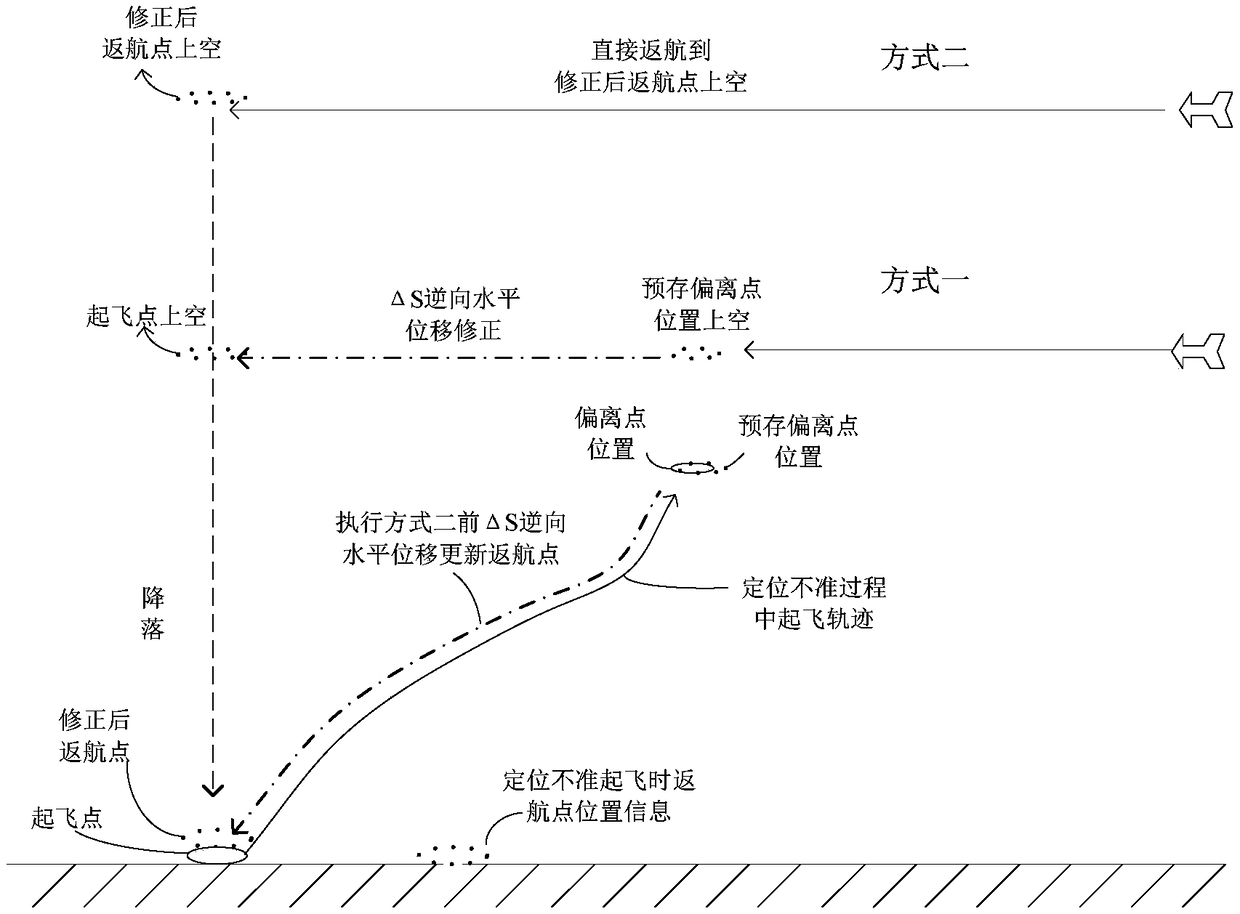
[0053] In order to solve the problem that when the UAV takes off from an environment with high-rise buildings around it, the GPS positioning accuracy error during low-altitude flight is very large due to the multi-path interference of the GPS, so that the UAV cannot return accurately. The present invention provides a The UAV return control method, which can still ensure that the UAV can return accurately when taking off in an environment with large GPS multi-path interference, avoiding the failure of the UAV to return to the take-off position in this case, causing the UAV The problem of loss or other safety accidents; or, in the good environment of GPS satellites in open areas, the UAV can still ensure that the UAV can r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More