

Multi-fire extinguishing water bomb device of rotor unmanned aerial vehicle, control system and method and unmanned aerial vehicle
A technology of unmanned rotor and control method, which is applied in the field of drones, and can solve the problems of drone landing, poor universality of ranging methods, unknown and unsafe places, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
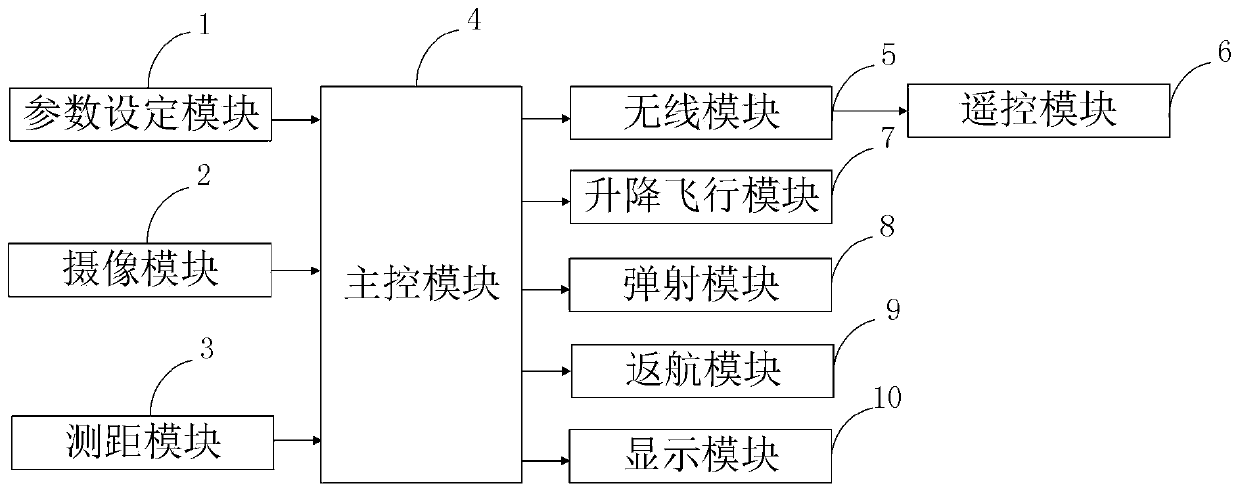
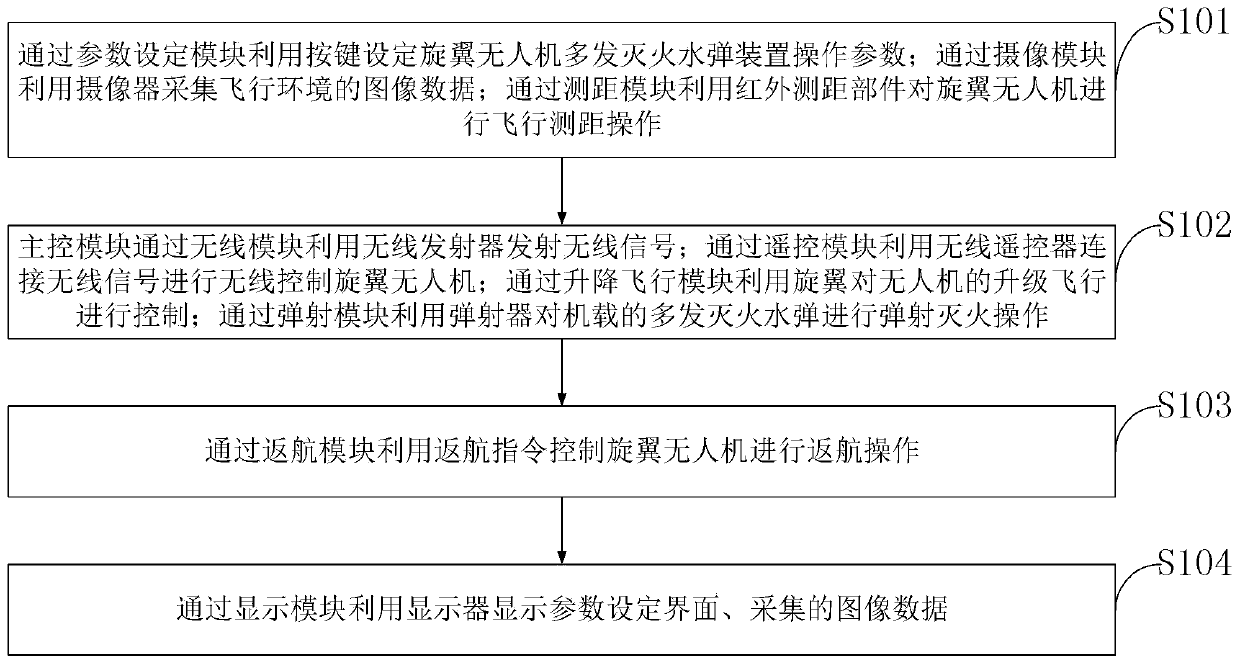
[0134] The ranging module 3 ranging method provided by the present invention includes:
[0135] (1) emit infrared light outwards through the transmitting end of the infrared distance measuring component;
[0136] (2) receiving reflected light corresponding to the infrared light through the receiving end of the infrared ranging component;
[0137] (3) Measure the distance of the obstacle relative to the drone according to the light intensity information of the reflected light.
[0138] The ranging method provided by the present invention further includes: adjusting the intensity of the infrared light emitted by the transmitting end through the amplifier.
[0139] The infrared ranging component provided by the present invention is also provided with a rotating part; the method also includes:
[0140] The rotating part is controlled to drive the infrared ranging component to rotate according to a preset rotation mode, so that the infrared ranging component senses obstacles in d...
Embodiment 2
[0152] The return method of the return module 9 provided by the present invention includes:
[0153] 1) Receive the return command sent by the control terminal or automatically triggered by the disconnection protection or automatically triggered by the low battery protection;
[0154] 2) Judging whether the pre-stored displacement correction amount is valid;
[0155] If not, control the UAV to return according to the pre-stored return point;
[0156] If so, control the UAV to return according to the pre-stored offset point.
[0157] The control of the UAV according to the pre-stored return point provided by the present invention before returning includes:
[0158] Obtaining the position information of the pre-stored return point;
[0159] The control of the UAV to return according to the pre-stored return point includes:
[0160] According to the obtained position information of the pre-stored return point, control the UAV to return to the sky above the pre-stored return p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More