

An agent-based path generation method for mobile devices in limited space
A mobile device and path generation technology, applied in the directions of measurement devices, road network navigators, navigation, etc., can solve the problems affecting the moving efficiency of mobile devices, and achieve the resolution of spatial agent conflicts, ensure validity, and accurate path generation results. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
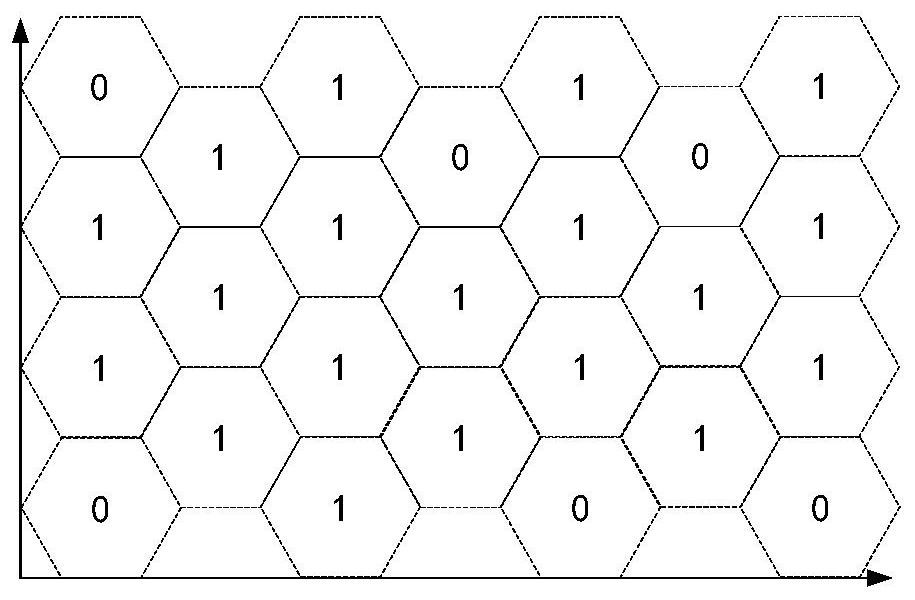
[0065] Example 1: Use the grid method to divide the workspace area of a certain type of mobile robot, such as figure 2 As shown in , each grid represents a spatial area, and the basic information of the grid is explained as follows based on the division results:
[0066] 1) The number of grids is m×n, and the number of each grid is represented by two-dimensional coordinates (i, j), where i represents the row coordinate and j represents the column coordinate;
[0067] 2) Initialize each grid to two states, 0 means the grid is occupied, 1 means the grid is not occupied;
[0068] 3) Each divided grid may become a certain path point in the path generation of the mobile device agent, and all searched path points constitute the moving path of the mobile device.
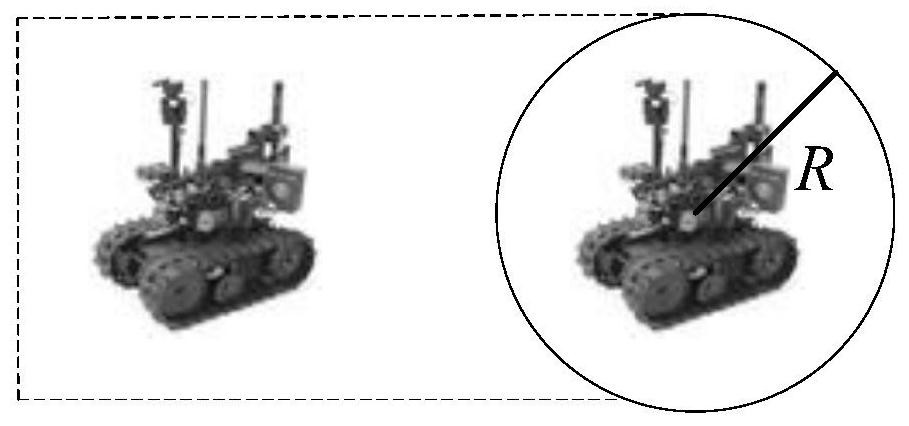
[0069] Step 2: Encapsulation of the mobile device smart body.
[0070] In order to more truly reflect the ratio of the length and width of the mobile device during movement, the present invention simplifies the moving ...
example 2
[0072] Example 2: Continuing from Example 1, the size of the robot when moving is 1.2m*0.8m, the basic parameters of the robot are shown in Table 1, and the time when the robot starts to move is defined as time 0.
[0073] Table 1 Robot related parameters
[0074]
[0075] 2) The deviation function of the movable device agent moving from the initial position to the target position is f goal said, f goal The bigger it is, the more unfavorable it is to get close to the target position, f goal for: Among them, θ(A i ) means that the mobile device agent is at position A i The angle from the target position G at time, Indicates that the mobile device agent is at position A i The deviation between the direction of motion and the direction of the target position, and alpha 1 , α 2 Indicates the weight of the two offset angle elements of the mobile device agent towards the target, and α 1 +α 2 =1.
example 3
[0076] Example 3: Continuing from Example 2, the robot’s initial position (580,76) before moving and the target position (620,120) have a deflection angle of θ(A i ), whose weight is 0.6; when moving, the direction of movement deviates from the target position Taking its weight as 0.4, then
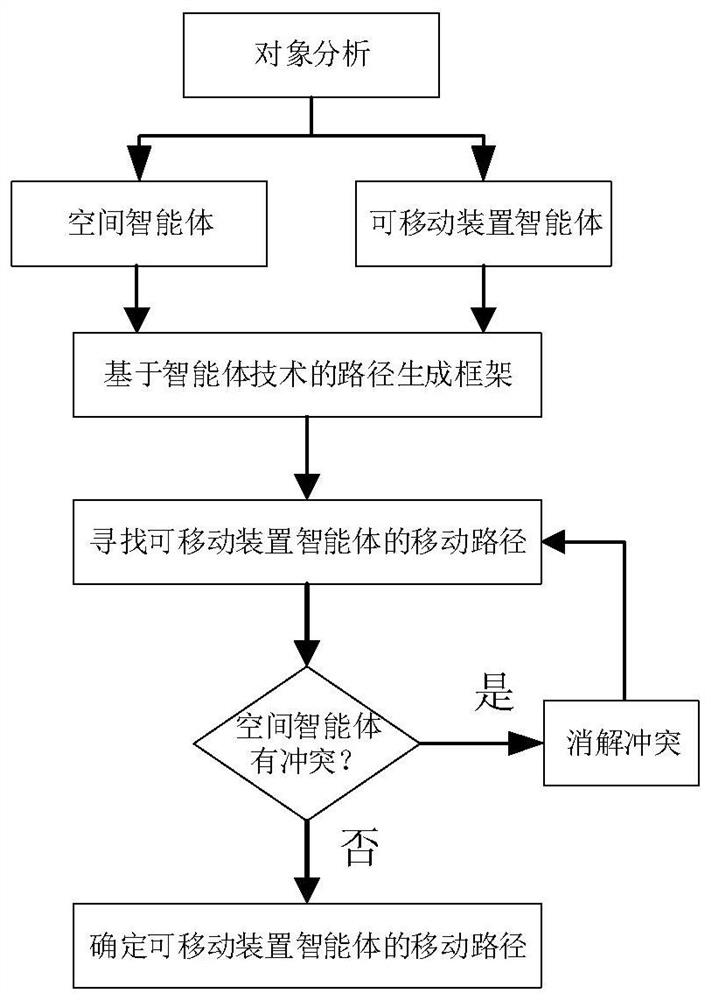
[0077] Step 3: Build a multi-agent path generation framework.
[0078] Describe the overall behavior of each mobile device agent as the behavior of running towards the target and avoiding obstacles; the behavior of running towards the target is represented by f goal to represent that the obstacle avoidance behavior is the behavior of the aircraft looking for a space agent whose state is 1, see Figure 5 .
[0079] 1) The time when the mobile device agent starts to move at its initial position is 0, and through a series of path searches, each path point is obtained to form a complete path of the mobile device agent from the initial position to the destination.
[0080] 2) Record the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More