

Improved speed obstacle method-based unmanned aerial vehicle conflict detection and resolution method
A speed obstacle, UAV technology, applied in vehicle position/route/altitude control, non-electric variable control, instruments and other directions, can solve problems such as large turning angle, increasing path length, and increasing number of maneuvers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the object, technical scheme and advantages of the present invention clearer, the following in conjunction with the attached Figure 1-Figure 5 and specific examples to clearly and completely describe the invention.
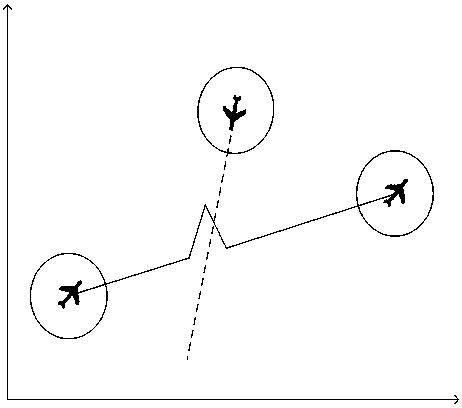
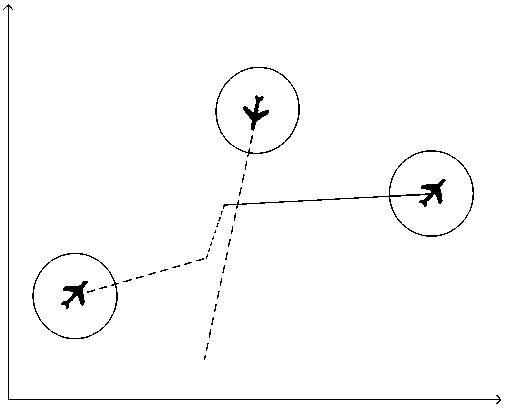
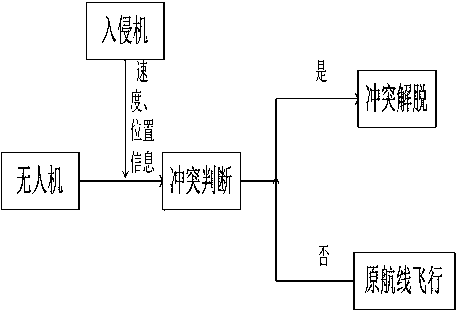
[0054] The present invention mainly applies the reciprocal speed obstacle method to the problem of conflict detection and conflict resolution of unmanned aerial vehicles. The technical problem to be solved is (1) the selection of the optimum speed of the unmanned aerial vehicle. Since the unmanned aerial vehicle is in the process of flying, Its speed may not be the best speed towards the target point, it needs to be converted into the optimal speed towards the target point, and how to calculate its size; (2) UAVs need to judge whether there will be conflicts in the future , if there is a conflict, how to re-select the speed; (3) After the conflict is resolved, the operation strategy adopted to shorten the path and reduce the number of mane...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More