

A precision compensation method for a split resolver for a position marker
A resolver and precision compensation technology, which is applied in the direction of instruments, general control systems, adaptive control, etc., can solve problems such as poor precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
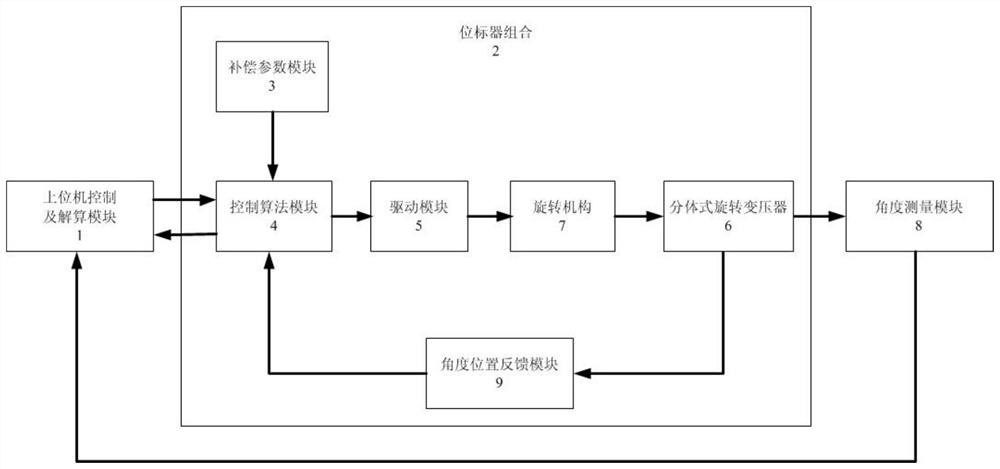
[0022] A device and method for improving the compensation of a split resolver, comprising: a host computer control and calculation module 1, a position marker combination 2, a compensation parameter module 3, a control algorithm module 4, a drive module 5, a split resolver 6, a rotary Mechanism 7, angle measurement module 8 and angle position feedback module 9.
[0023] Wherein, the compensation parameter module 3 , the control algorithm module 4 , the driving module 5 , the split resolver 6 , the rotating mechanism 7 and the angle position feedback module 9 belong to the position marker combination 2 .
[0024] The two communication ends of the upper computer control and calculation module 1 are respectively connected to the communication port of the angle measurement module 7 at the position marker combination 2, the angle measurement module 8 is fixed on the rotating mechanism 7, and the split resolver 6 is coaxially installed On the rotating mechanism 7 and rotate thereupo...
Embodiment 2
[0026] Using the compensation method of the above-mentioned position marker with a coaxially installed split resolver precision compensation system, the specific steps are:
[0027] Step 1: Fix the angle measurement module 8 on the rotating mechanism 7 .
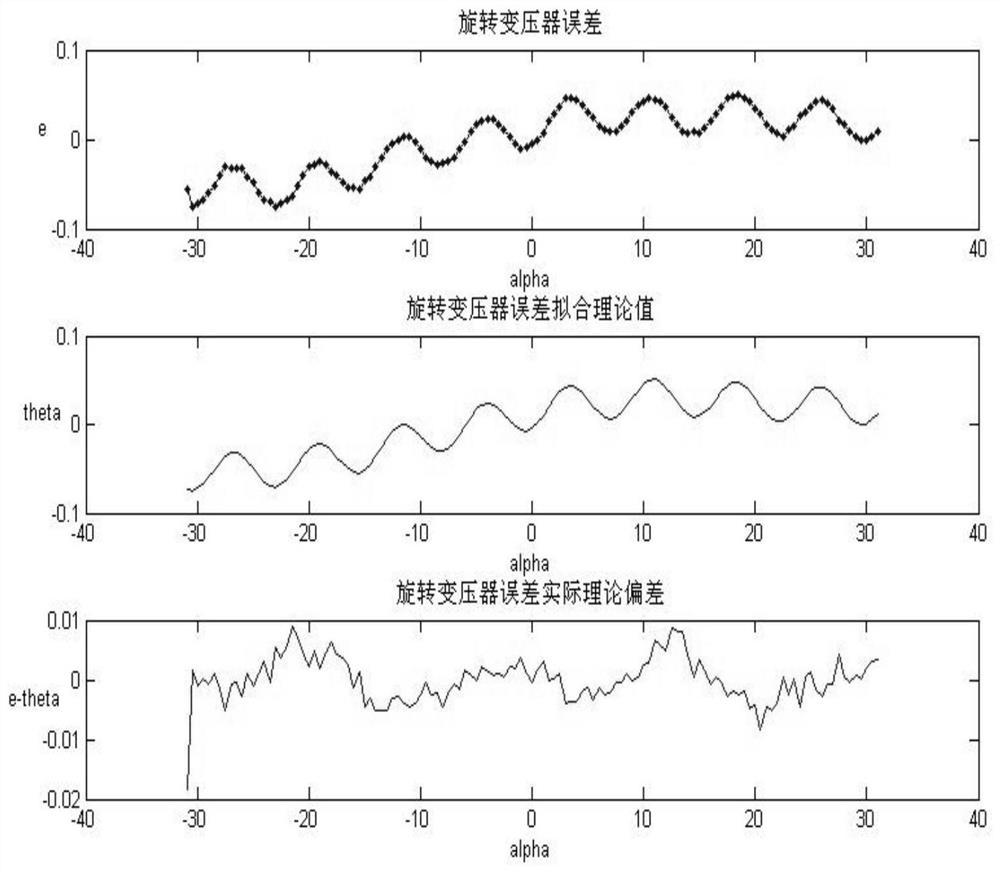
[0028] Step 2: The upper computer control and calculation module 1 presets the angle through communication with the position marker combination 2 and reads the electrical feedback angle α of the split resolver 6 1 At the same time, the upper computer control and calculation module 1 reads the actual rotation mechanical angle β of the split resolver 6 and the rotation mechanism 7 through communication with the angle measurement module 8 1 , the host computer control and calculation module 1 calculates the electrical feedback angle α of the split resolver 6 1 and the actual rotation mechanical angle β 1 Error e 1 = β 1 -α 1 .
[0029] Step 3: By repeating the above process, averagely take n angles within the range of mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More