Amplification augmented reality system for online marking of astigmatism axial position
An astigmatism axial position and augmented reality technology, which is applied in the field of augmented reality technology for real-time indication of corneal astigmatism axial position, can solve the problem that the corneal astigmatism axial position cannot be calibrated online, and achieves the effect of convenient and accurate astigmatism positioning operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
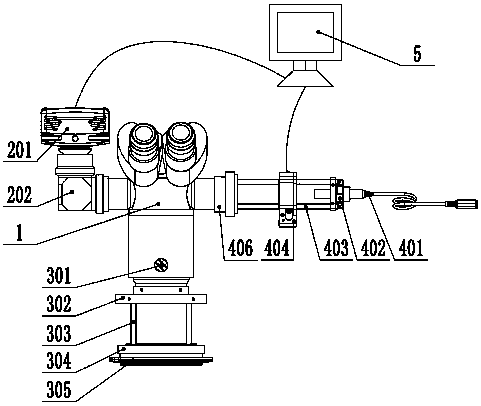
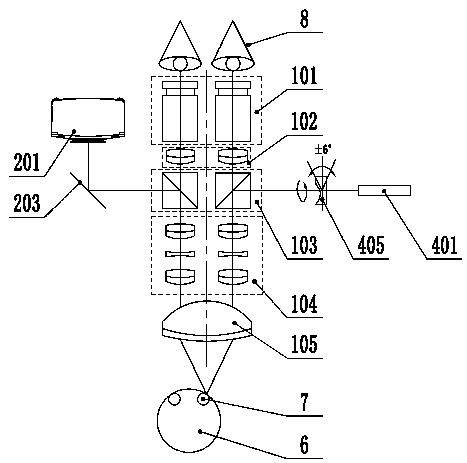
[0022] The present invention will be further explained below with reference to the accompanying drawings: an augmented reality system for marking the axis of astigmatism online, comprising: a microscopic imaging unit and a laser indicating unit, the display imaging unit includes an eyepiece optical path assembly 101, The binocular optical path component 102, the beam splitter prism 103, the variable magnification optical path component 104 and the objective lens 105; the laser indicating unit includes a laser transmitter 401 and a lens 405 that can rotate along its own axis; the laser light emitted by the laser pointer passes through the objective lens It is refracted by the dichroic prism and projected on the eye 7 to be inspected for marking the astigmatism axis of the inspected object. The present invention provides an augmented reality system for marking the axis of astigmatism on-line. A laser indicating unit is used to mark and indicate the axis of astigmatism of an object...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



