Miniature six-legged robot
A robot and miniature technology, applied in the field of robotics, can solve the problems of a large number of power devices, a large number of degrees of freedom of a crawling mechanism, and difficulty in miniaturizing a robot, and achieve the effect of a simple implementation method and few degrees of freedom.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with accompanying drawing.
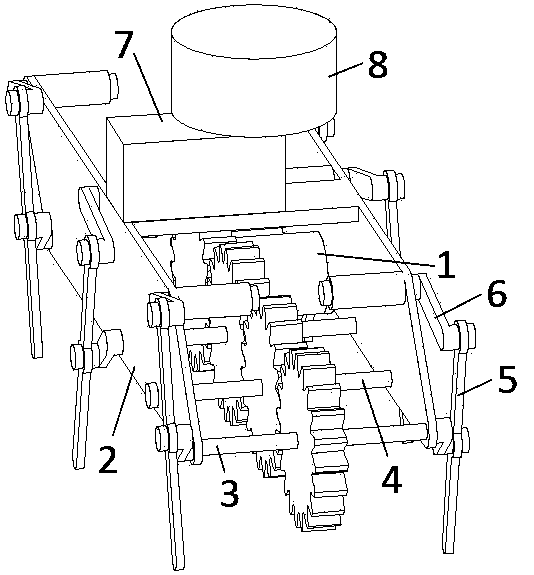
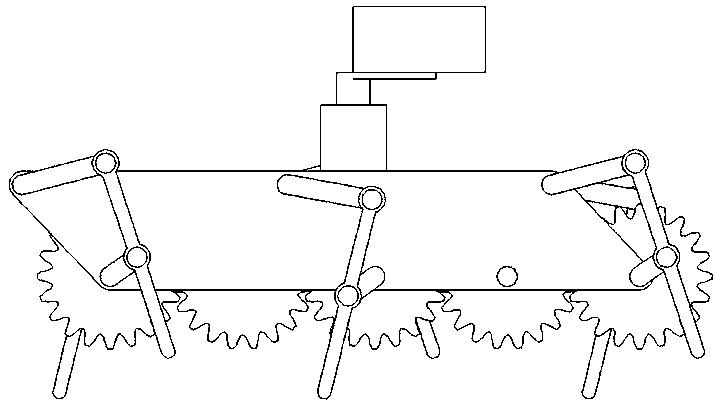
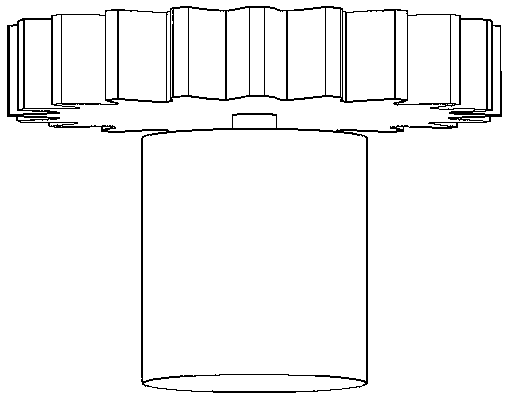
[0026] The invention provides a miniature six-legged robot, such as figure 1 , figure 2 shown. The six-legged robot includes a motor 1, a frame 2, a crank 3, an intermediate shaft 4, a connecting rod 5, a rocker 6, a steering gear 7, and a weight 8. The motor 1 is fixed on the frame 2. When the six-legged robot is stationary on the horizontal plane, the axis of the output shaft of the motor 1 is perpendicular to the longitudinal axis of the six-legged robot and parallel to the horizontal plane. Gears are fixed on the output shaft of the motor 1 . motor 1 as image 3 As shown, rack 2 as Figure 4 shown.
[0027] The crank 3 is connected to the frame 2 through the first complete rotation pair, and the axis of the first complete rotation pair is parallel to the axis of the output shaft of the motor 1 . crank 3 as Figure 5 shown. Gears are fixed on the crank 3, and th...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap