

Inertial platform system accelerometer installation error accurate calibration method
A technology for accelerometer and installation error, which is applied in the field of precise calibration of accelerometer installation error in inertial platform systems, and can solve problems such as inability to identify accelerometer installation error, complicated calculation process, and disregard of accelerometer installation error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0073] The method of the present invention will be further described below in conjunction with the accompanying drawings:
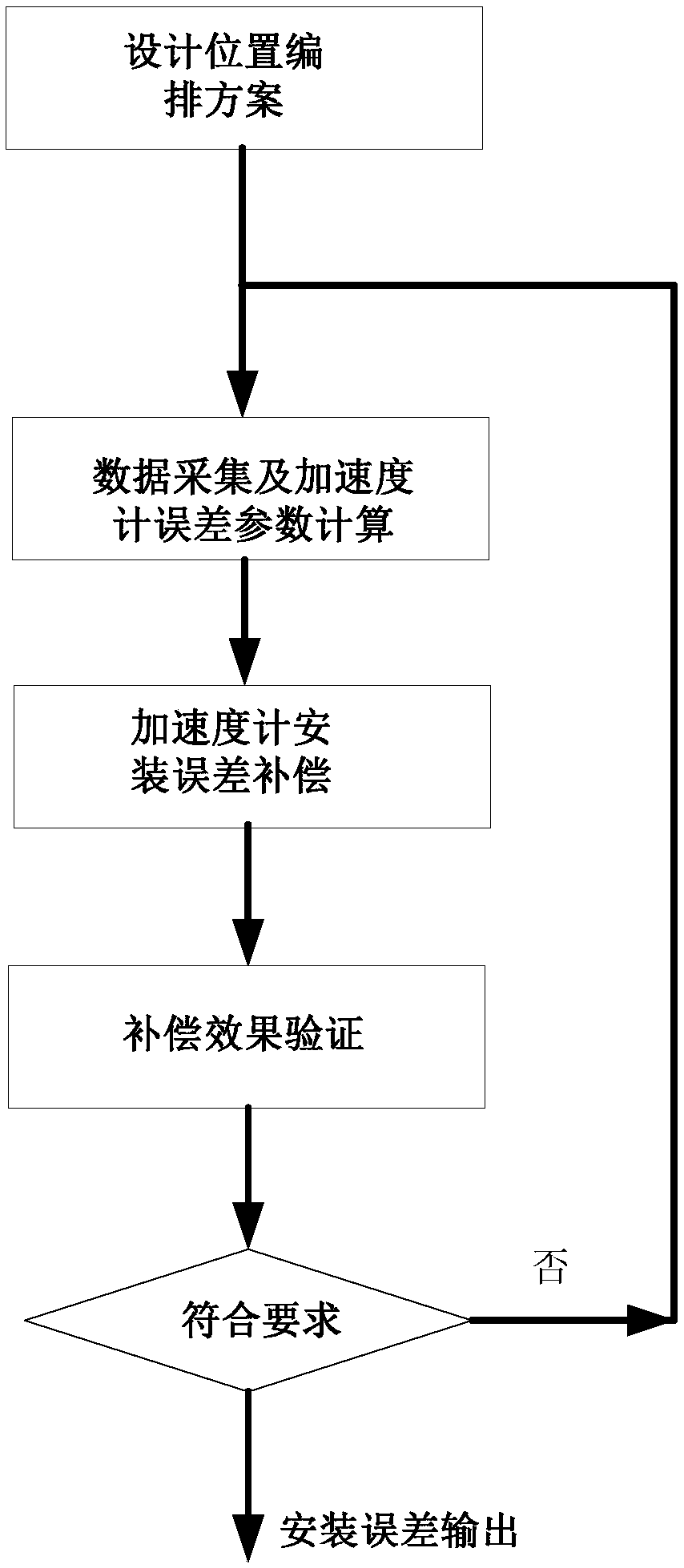
[0074] The specific process of the method is as follows figure 1 Shown:
[0075] 1. Three accelerometers are installed on the inertial platform body in two orthogonal ways, and the arrangement scheme of the calibration position of the accelerometer is designed;
[0076] The accelerometer parameters are calibrated using a six-position arrangement scheme, and the specific arrangement is shown in Table 1. Before the six-position calibration, the acceleration measurement channel should complete the early error compensation such as the asymmetry of the analog-to-digital conversion scale factor, the non-linearity of the scale factor, and the temperature compensation to ensure the accuracy of the subsequent accelerometer installation error calibration.
[0077] Table 1 Arrangement of accelerometer parameter calibration position
[0078]
[0079] The six turning positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More