

A UAV Path Planning Method Based on q(λ) Algorithm
A path planning and unmanned aerial vehicle technology, applied in navigation calculation tools, vehicle position/route/altitude control, instruments, etc., can solve problems such as difficulty in acquisition, local minimum or local oscillation of the algorithm, and high time cost of the algorithm, etc., to achieve Accelerate the speed of convergence, effectively update online, and improve the effect of convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0067] The present invention will be further explained below in conjunction with the accompanying drawings.
[0068] For the convenience of description, simply define the main variables in the algorithm:
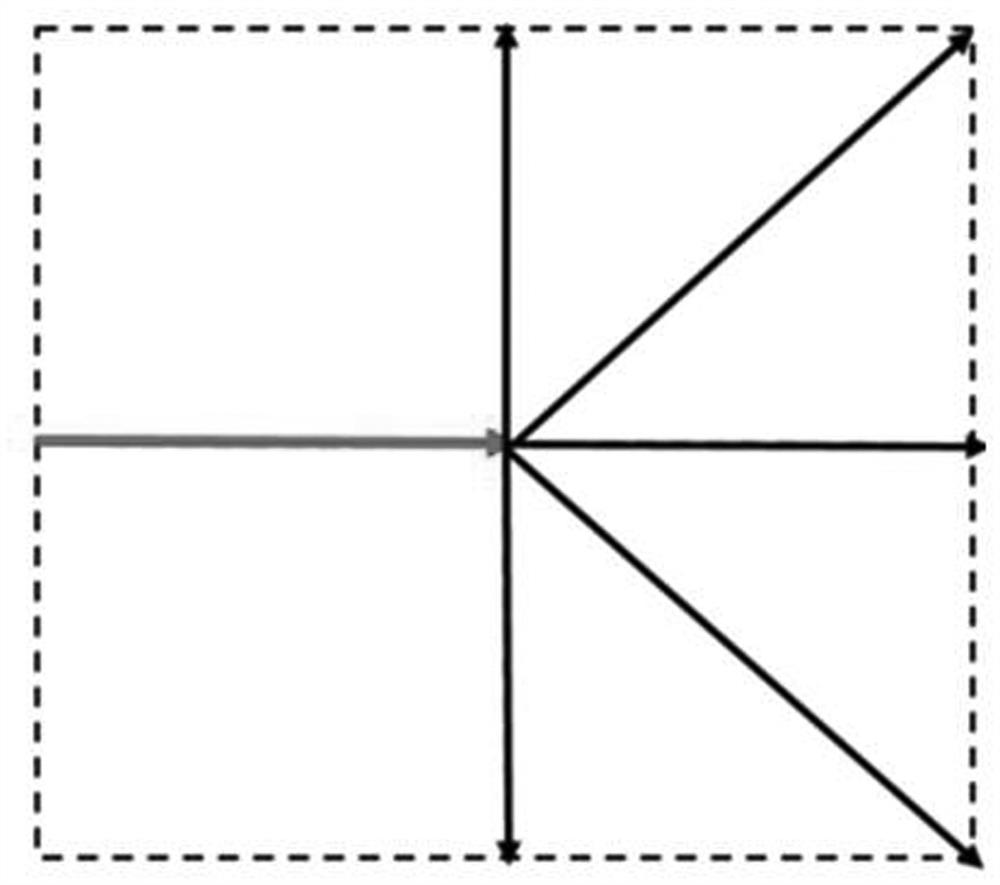
[0069] The latitude and longitude coordinates of the starting point of the UAV are S=(lon S ,lat S ), the longitude and latitude coordinates of the target point are T=(lon T ,lat T ), the size of the grid space is m*n, and the point coordinates in the grid space are (x, y). The Markov model is represented by a quadruple , S is the state space of the drone, A is the action space of the drone, R is the reward function, and P is the state transition probability matrix.
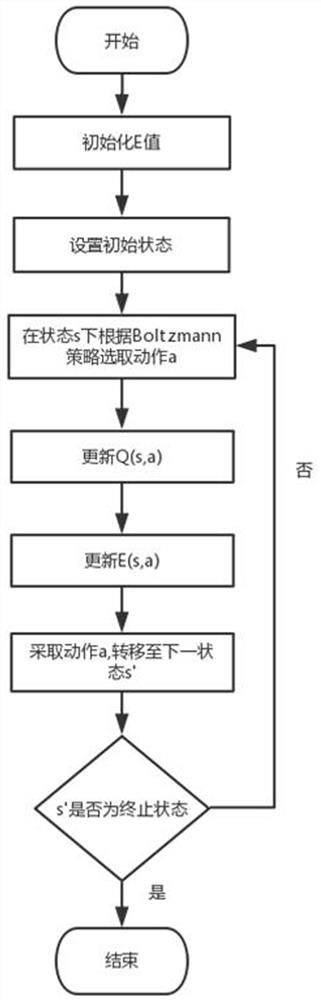
[0070] The present invention proposes a UAV path planning method based on the Q(λ) algorithm, including an environment modeling step, a Markov decision process model initialization step, a Q(λ) algorithm iterative calculation step, and calculating the optimal value according to the state value function. pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More