

Method, device and equipment for autonomous parking, and computer readable storage medium
An autonomous parking and parking technology, which is applied in the field of computer-readable storage media and autonomous parking, can solve problems such as unsuccessful realization of autonomous parking, vehicles stuck in a certain position, and fuzzy strategy boundaries, etc., to achieve parking The process is simple and efficient, the effect of ensuring correctness and avoiding misjudgment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In the following, only some exemplary embodiments are briefly described. As those skilled in the art would realize, the described embodiments may be modified in various different ways, all without departing from the spirit or scope of the present application. Accordingly, the drawings and descriptions are to be regarded as illustrative in nature and not restrictive.
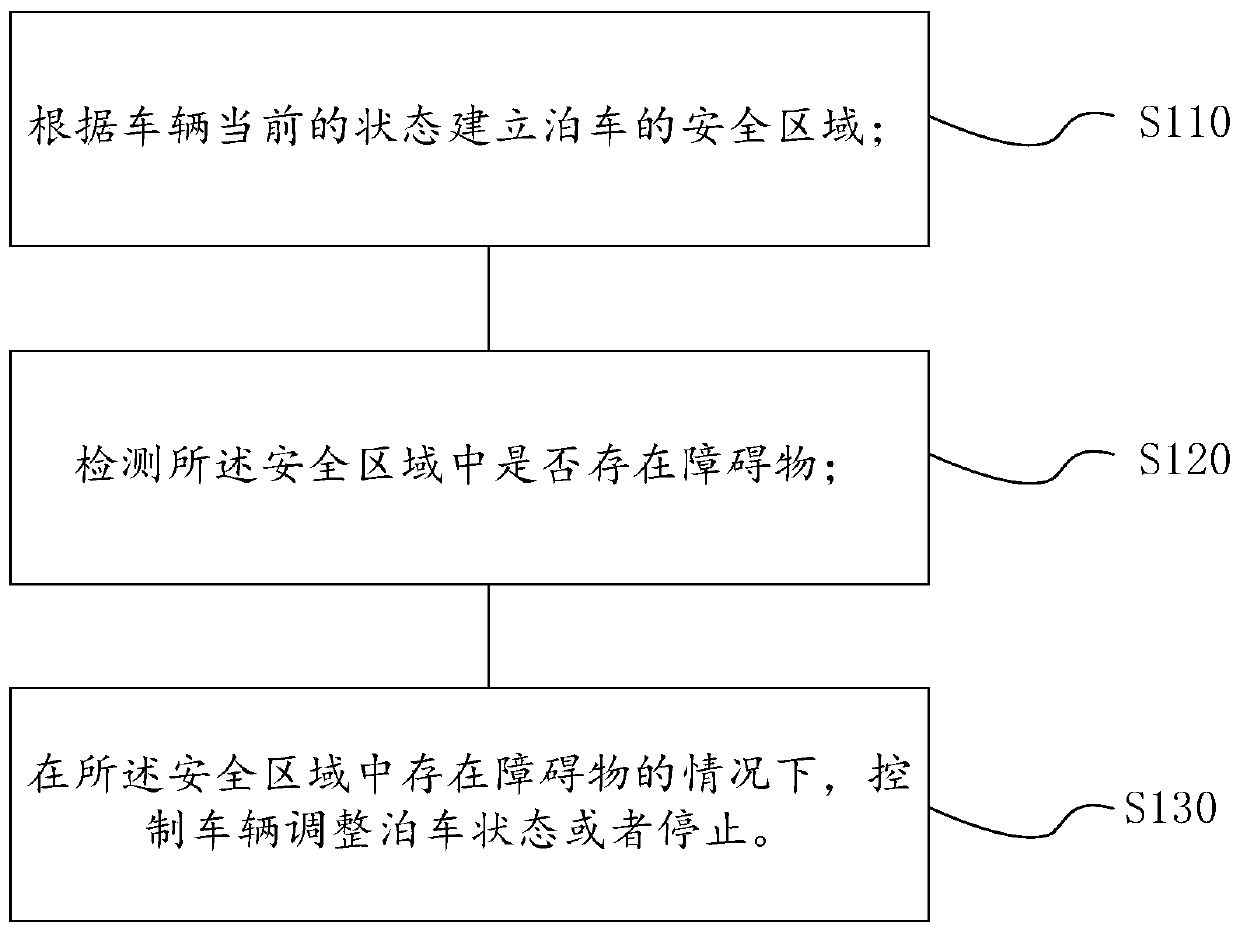
[0039] figure 1 A flowchart showing a method for autonomous parking according to an embodiment of the present application. like figure 1 As shown, the method for autonomous parking includes:
[0040]Step S110, establishing a safe area for parking according to the current parking state of the vehicle;
[0041] Step S120, detecting whether there is an obstacle in the safety area;
[0042] Step S130, if the obstacle exists in the safety area, control the vehicle to adjust the parking state or stop.
[0043] The establishment method of the embodiment of the present application establishes a corresponding...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More