

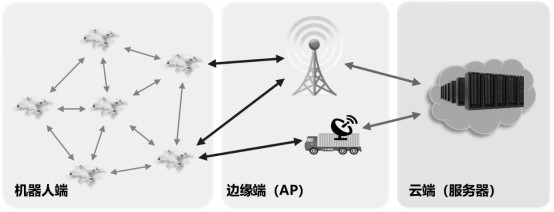
A Jointly Optimized Cloud Robot System Delay Optimization Method
A robot system and joint optimization technology, applied in transmission systems, manipulators, program-controlled manipulators, etc., can solve problems such as delay improvement, task execution time limit, task failure, etc., to reduce delay, reduce complexity, and improve performance. performance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
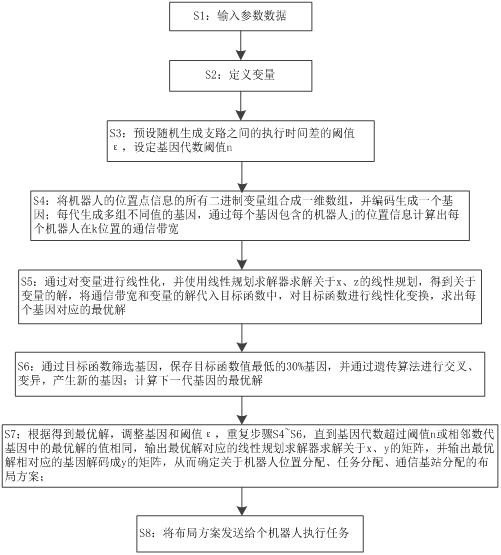
[0050] Such as figure 2 Shown, a kind of optimization method of the cloud robot system delay of joint optimization, described this optimization comprises the following steps:
[0051] S1: Input the location point information of the robot, the set is k, and input the parameters of each robot, the parameters include the robot processor frequency f max , input the computer CPU cycle required for each task, and input the calculation amount of task i Task i , input the amount of transmitted data Data generated by task i i , input the computing power E of the cloud server c 0 , input the bandwidth capability of the base station;
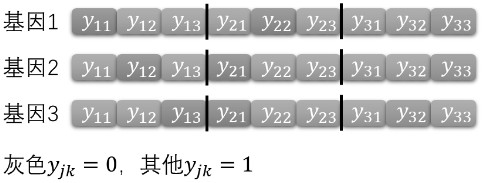
[0052] S2: Define whether the robot j is placed on the location point k to perform the task as y jk , define whether task i is assigned to robot j to execute the task as x ij , define whether the data i is uploaded to the cloud server through the base station n as z in ;
[0053] S3: Preset the threshold ε of the execution time difference between r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More