

Detection and validation of objects from sequential images from camera by means of homographs
A homography matrix and camera technology, applied in the field of driver assistance systems, can solve problems such as system performance degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
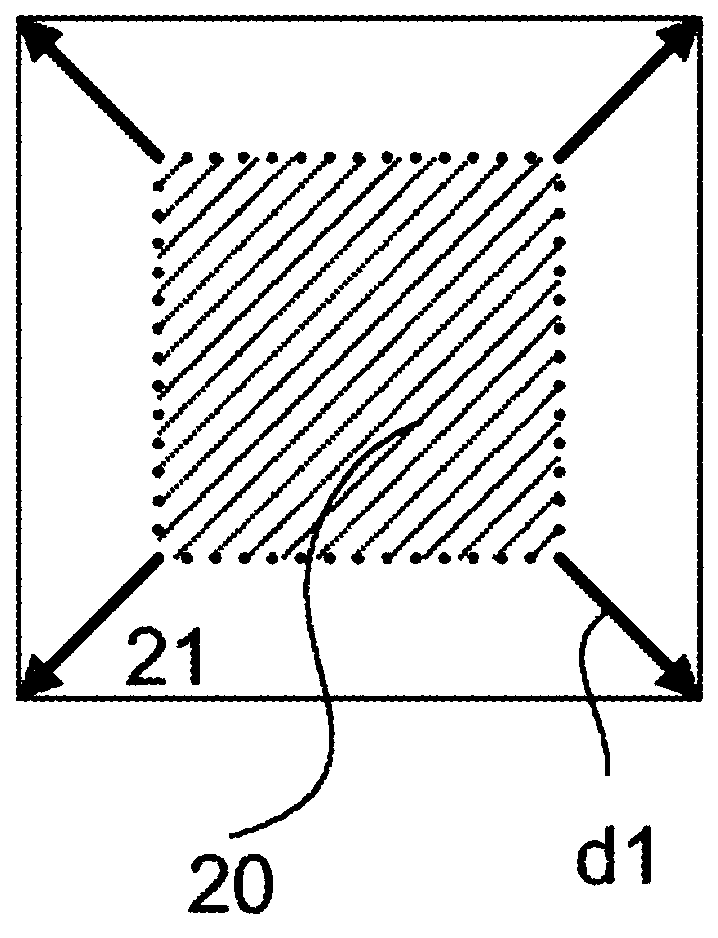
[0055] figure 1 A back plane (English: back plane) is schematically depicted in , which occupies the hatched area ( 20 , shown by dashed line) at a first time point t−1 . At a subsequent point in time t, the distance between the on-board camera and the rear plane decreases, which results in a deformation of the region of the rear plane in the image ( 21 , indicated by a solid line), indicated by the arrow ( d1 ). The scaling or magnification of the area (20; 21) is the result of the relative movement of the on-board camera with respect to the back plane.
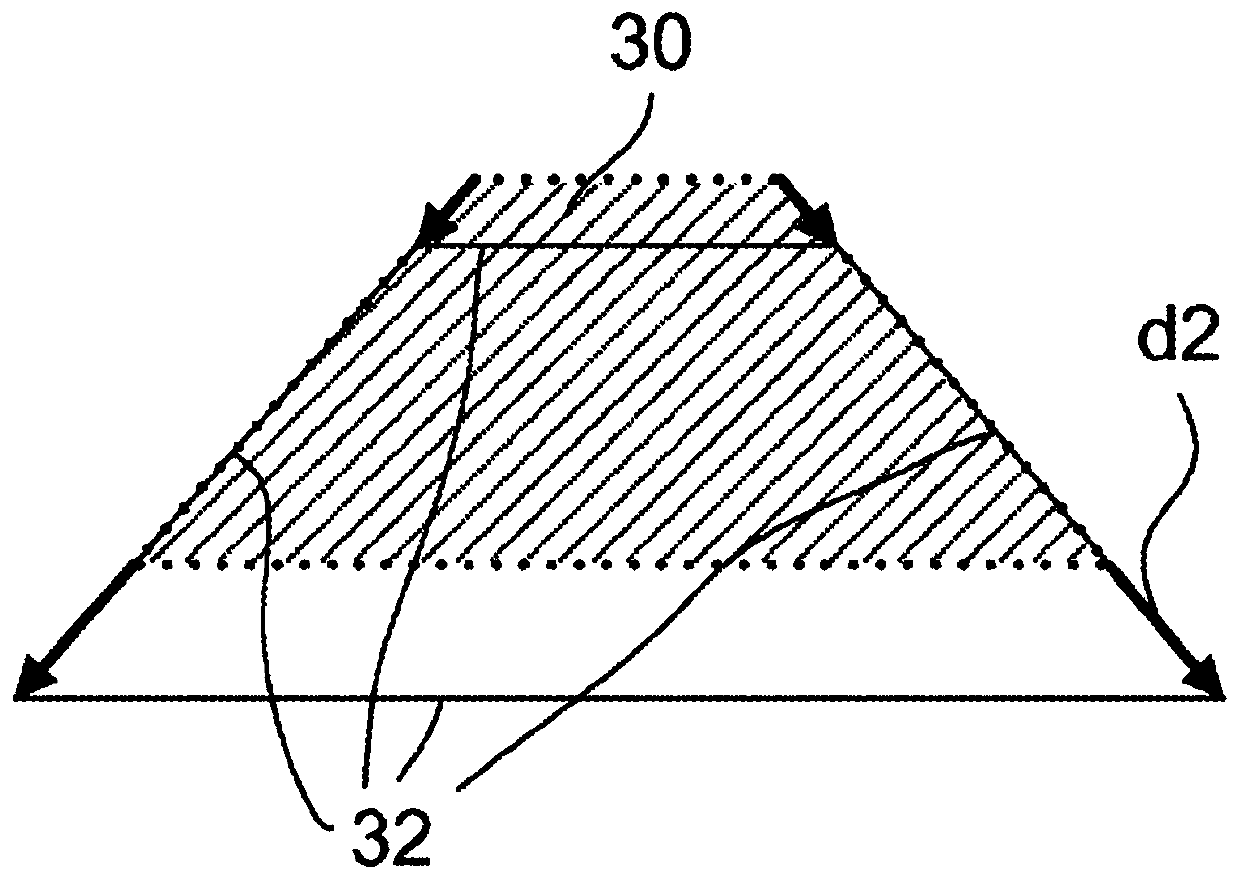
[0056] figure 2 A ground plane (English: ground plane) is schematically depicted, which occupies the hatched area (30, shown by dashed lines) at a first time point t−1. This may be a portion of the roadway surface on which the vehicle travels. Due to the self-motion of the on-board camera, the area (in the image) changes at a subsequent point in time t, resulting in a deformation of the area ( 32 ) of the base plane outl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More