

System and method for detecting boundary of working area based on vision, and machine equipment
A technology of working area and detection system, which is applied in the direction of instruments, computer components, two-dimensional position/channel control, etc., to achieve strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
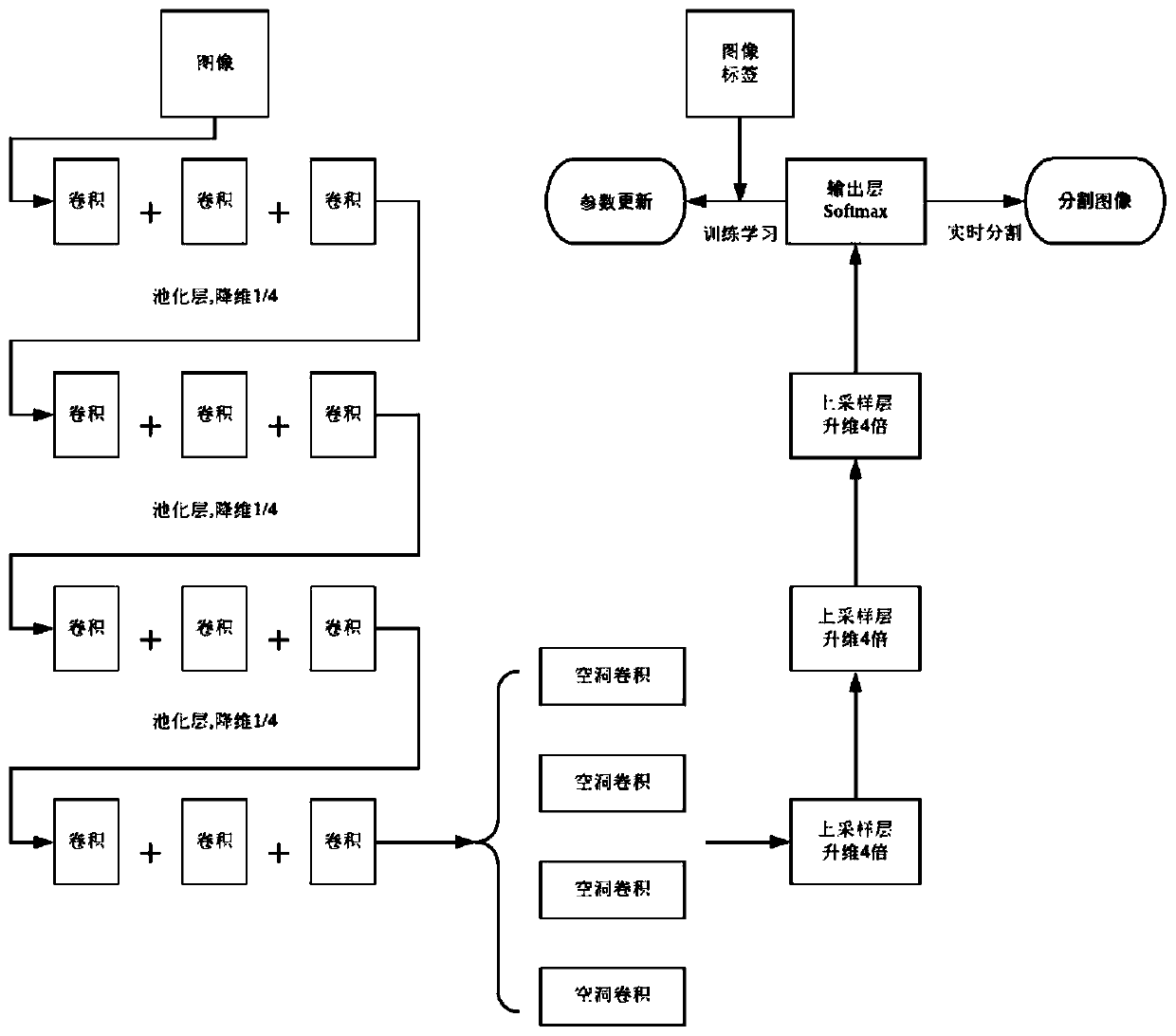
[0036] This solution is based on neural network technology to perform image semantic segmentation on the video images collected by the camera, so as to realize accurate perception of the environment and identify the boundaries of the working area.
[0037] According to this principle, this program builds a corresponding neural network model, and at the same time obtains real working scene pictures to form a corresponding training data set, and then uses the training data set to independently train and learn the formed neural network model, extracts and learns the corresponding The characteristics of the working area, thus obtaining the trained deep neural network model.
[0038] In application, the deep neural network model obtained by training ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More