

Multi-unmanned aerial vehicle task assignment conflict resolution method under communication delay constraint
A task assignment and multi-UAV technology, which is applied in three-dimensional position/channel control and other directions, can solve problems such as threatening the safety of take-off and landing aircraft, and interfering with the operation order of the airport
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
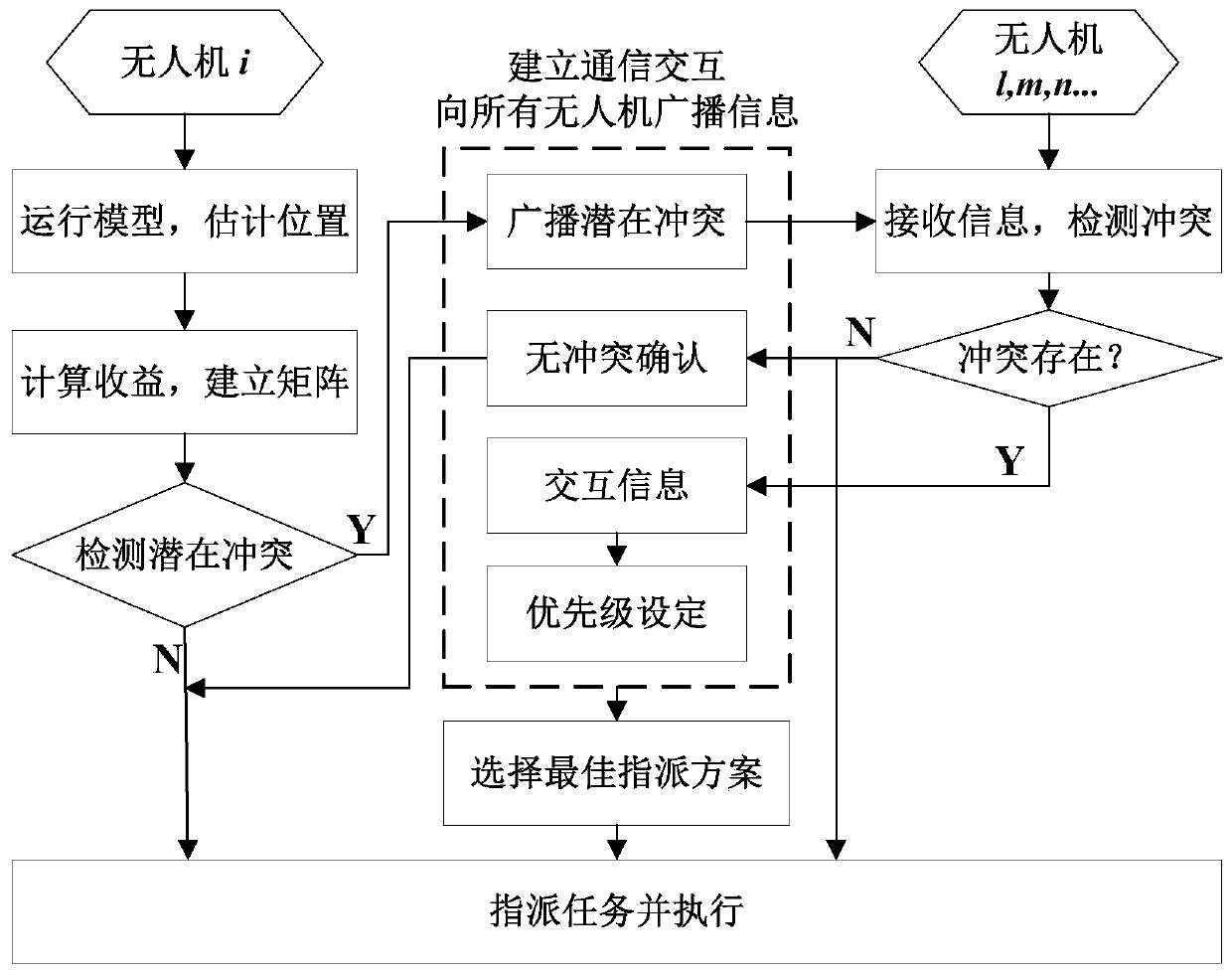
[0040] Suppose the UAV formation consists of N u It consists of two drones, all of which are of the same type. There are N in the task execution area t goals, each with its own value V j (j=1,2...,N t ). The steps of the algorithm are as follows (see attached figure 1 ):
[0041] Step 1: Establish a multi-UAV cooperative task assignment model.
[0042] UAVs can perform 4 different tasks, that is, the default search task for the entire domain, and at the same time perform 3 tasks of classification, attack and verification for each known target, and must meet strict order requirements, that is, must first Target classification, re-strike, and finally verification.
[0043] When a new target is discovered or the target state changes, new information is input into the model, and the algorithm is run again. The algorithm model can be expressed as:
[0044] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More