

Multi-unmanned aerial vehicle path collaborative planning method and device based on hierarchical reinforcement learning
A multi-drone, reinforcement learning technology, applied in the field of aircraft
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055]In order to make the purpose, technical solution and advantages of the present invention clearer, a clear and complete description will be given below in conjunction with the schematic structural diagram of the device of the present invention and the detailed steps of the algorithm.
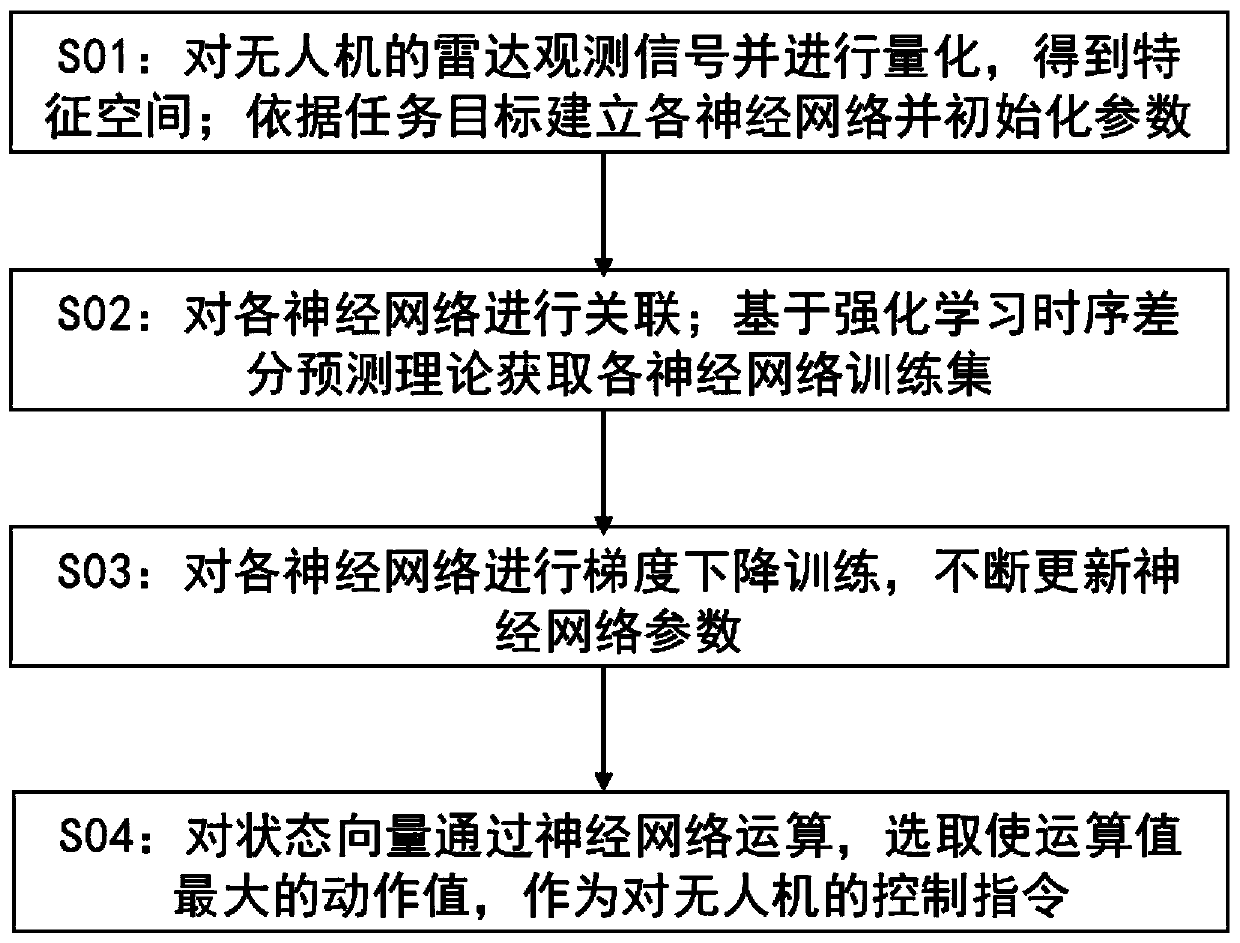
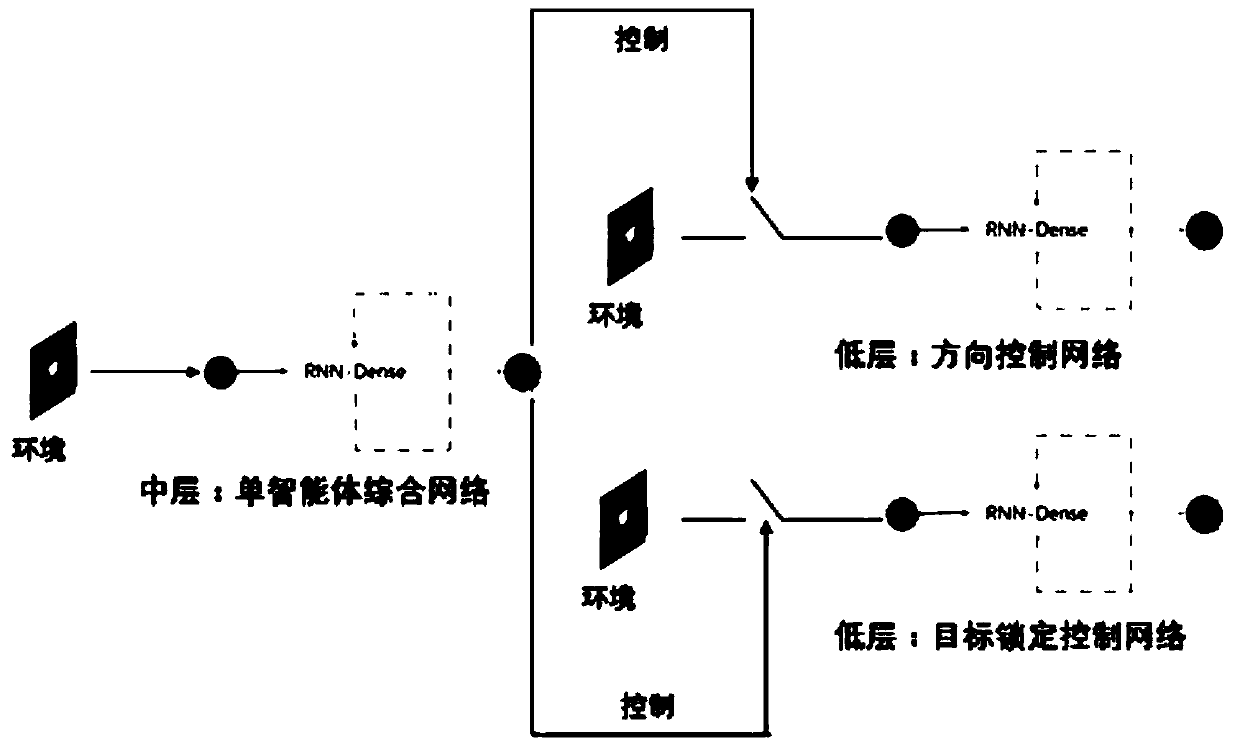
[0056] The present invention provides a multi-UAV cooperative path planning method in the air based on layered reinforcement learning. The problem considered is: for a single UAV, the shortest and safest path can be found; Satisfy certain conditional constraints, which are generally set according to the needs of actual tasks, for example: logistics robots keep flying in the same column as much as possible, and deliver a large batch of goods to the same distribution point.
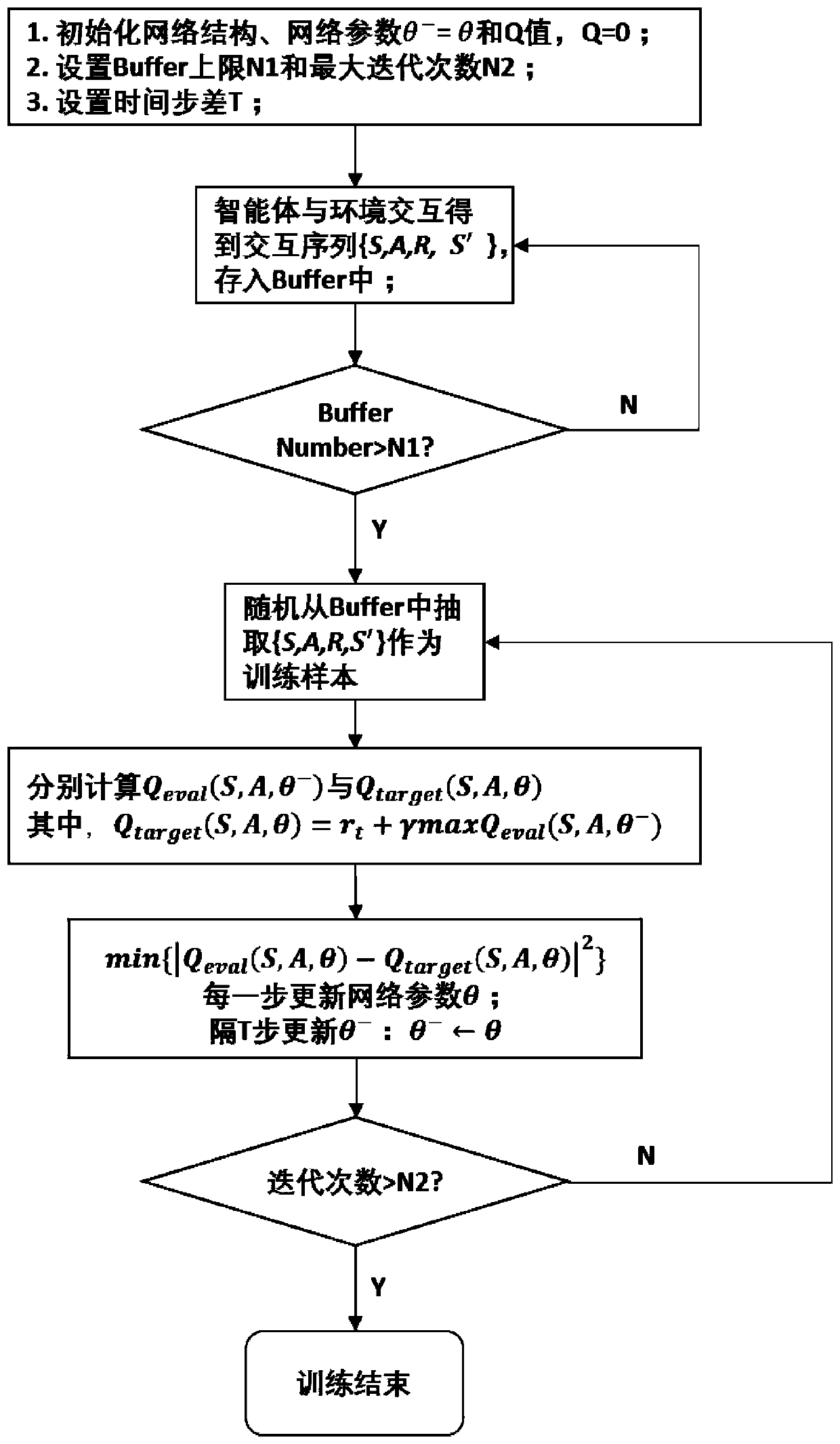
[0057] In order to eliminate the "dimension disaster" problem in the classical reinforcement learning Q-learning method, the neural network is used to store calculation parameters to improve real-time performance, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More