

A four-finger driving mechanism for rehabilitation training
A driving mechanism and rehabilitation training technology, applied in passive exercise equipment, physiotherapy and other directions, can solve the problems of inability to realize the bending action of four fingers, stuck and other problems, and achieve the effect of no stuck and improved comfort.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
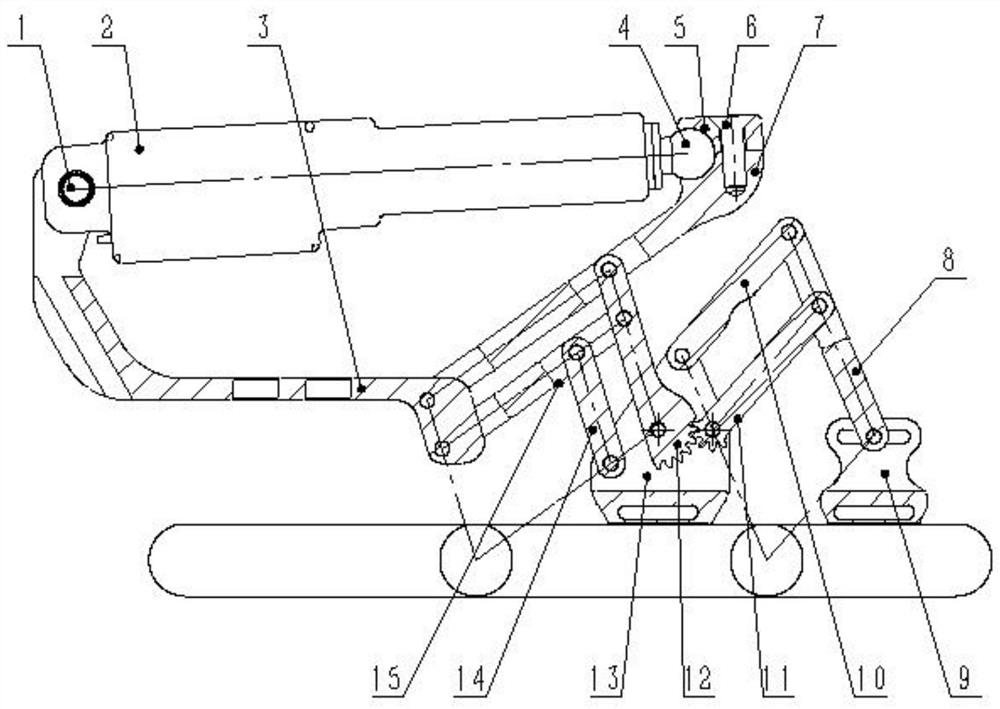
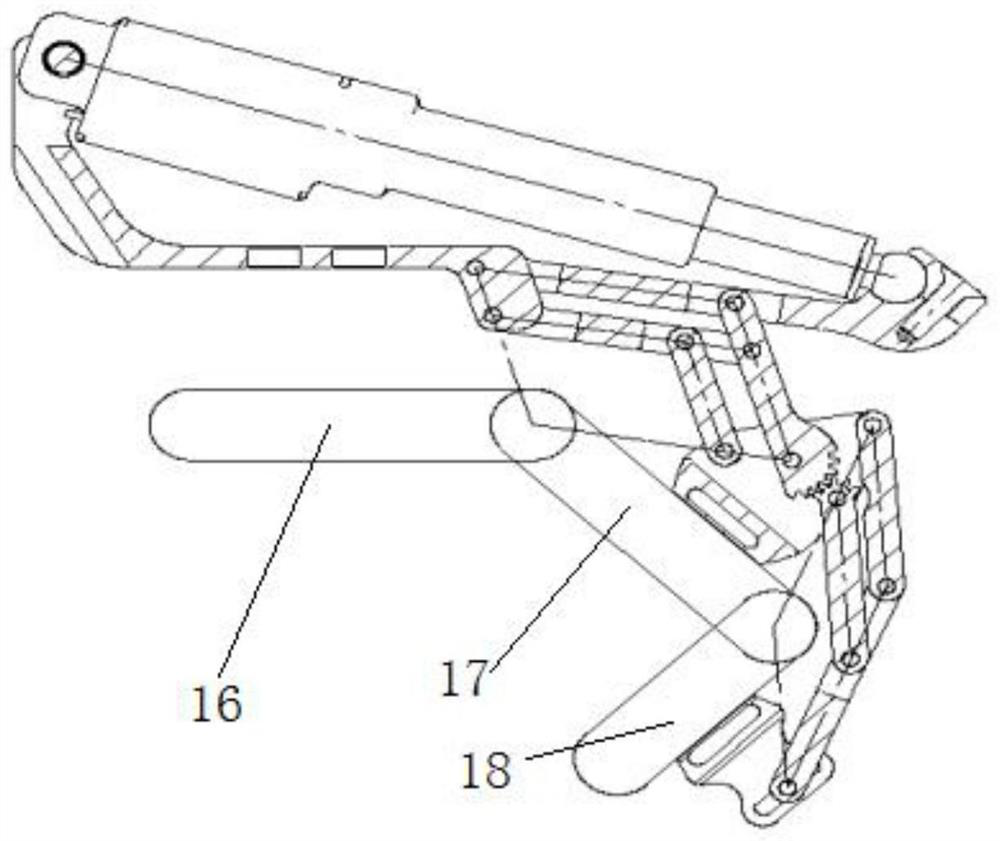
[0023] like Figure 1-2 As shown, the present embodiment provides a four-finger driving mechanism for rehabilitation training, including a support 3, a linear driver 2, a first linkage mechanism, a second linkage mechanism, a finger proximal phalanx support 13 and a finger middle phalanx support 9; The bottom end of the linear driver 2 is hinged on the support 3, and the output end is hinged to the first linkage mechanism; the end of the first linkage mechanism that is not connected to the linear driver 2 is hinged to the On the support 3, the first linkage mechanism is also connected with the proximal phalanx support 13 of the finger, and the proximal phalanx support 13 of the finger is used for fixedly connecting the first joint 17 of the finger; one end of the second linkage mechanism is connected to the The proximal phalanx bracket 13 of the finger is connected, and the other end is connected to the middle phalanx bracket 9 of the finger, and the middle phalanx bracket 9 o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More