

Self-adaptive dynamic surface control method considering nonlinear active suspension actuator
A technology of dynamic surface control and active suspension, which is applied to instruments, special data processing applications, electrical digital data processing, etc., can solve the problems of simple suspension mathematical model and insufficient control accuracy, and achieve the reduction of suspension moving stroke, The effect of improving the overall performance and reducing the dynamic and static load ratio of the tire
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0115] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0116] The technical solution adopted by the present invention to solve the technical problems is as follows:
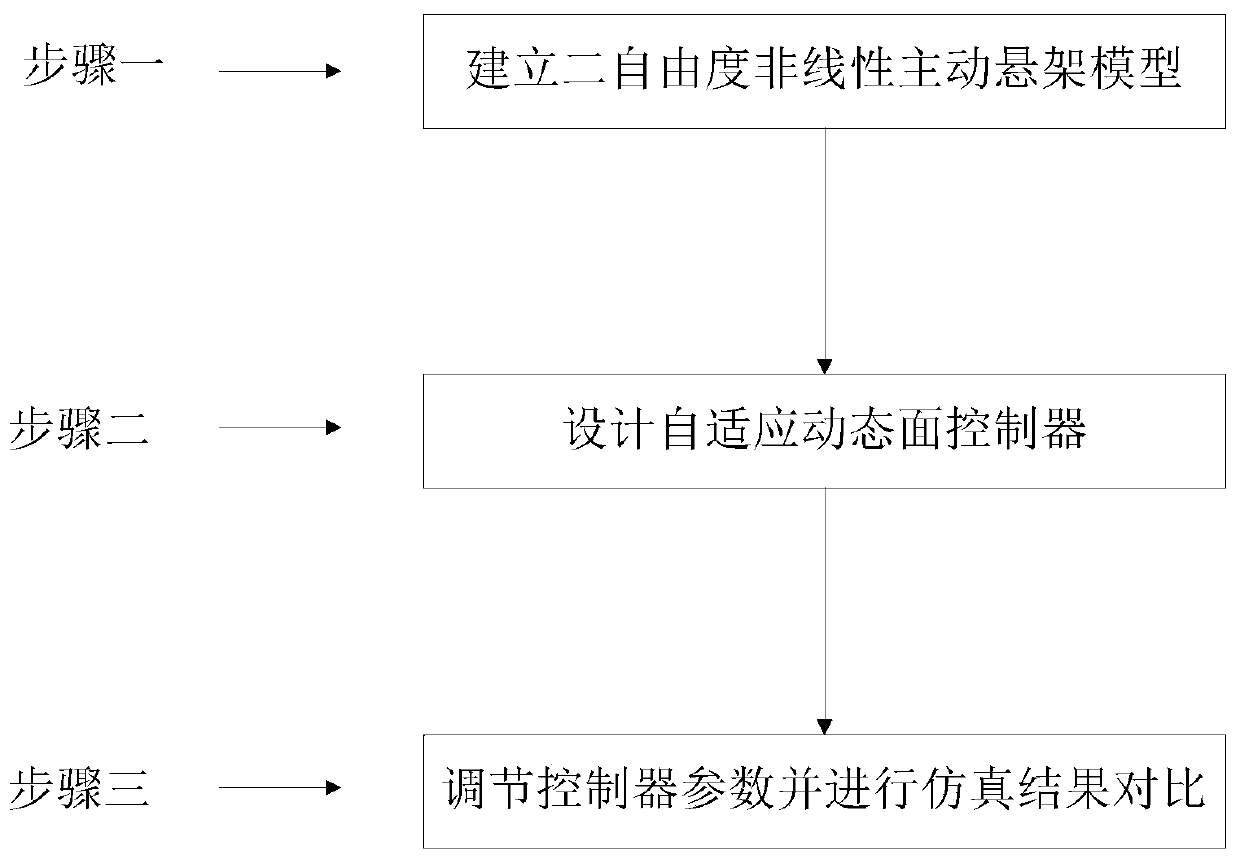
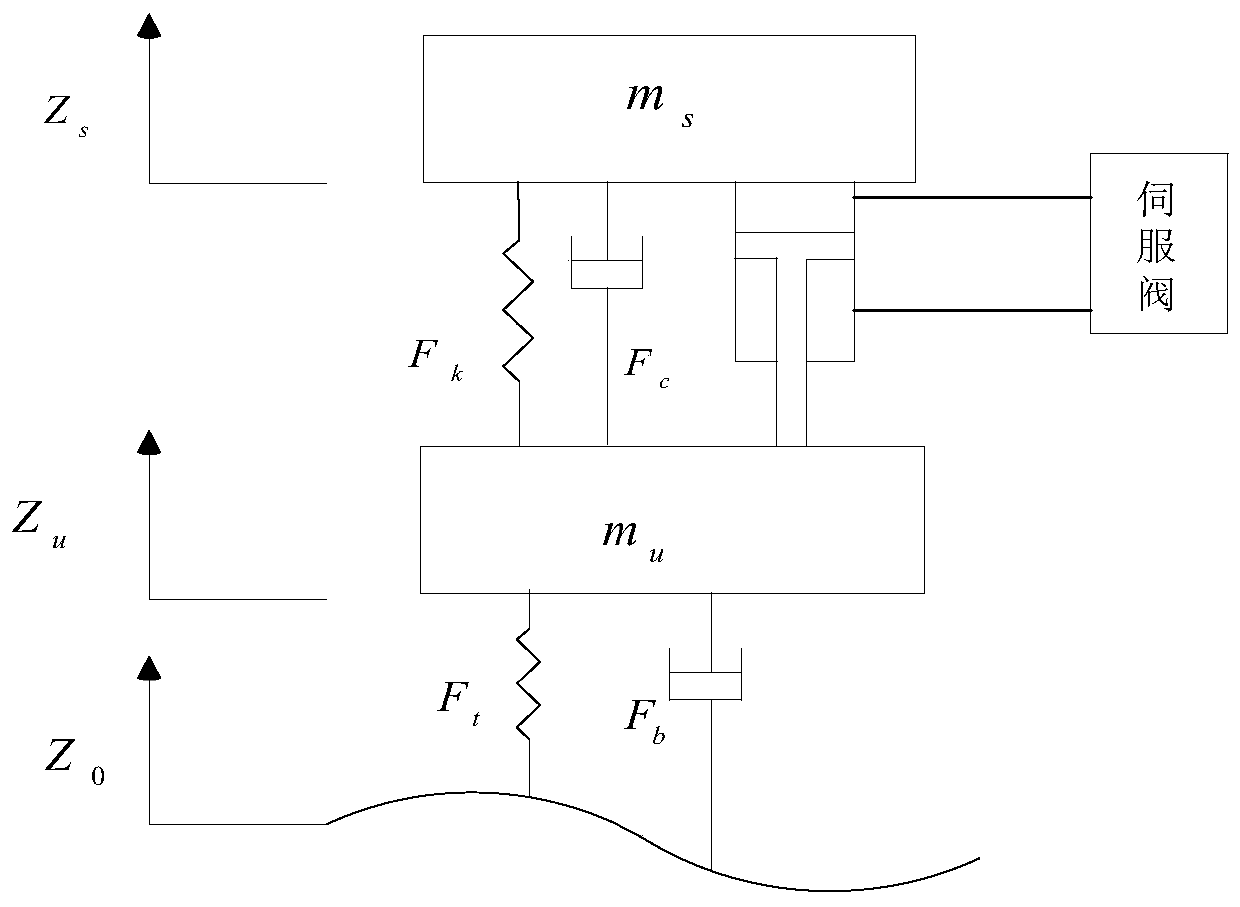
[0117] Step 1, establishing a two-degree-of-freedom nonlinear active suspension model;
[0118] Step 2. Deduce the formula required by the controller of this patent, and perform stability proof;
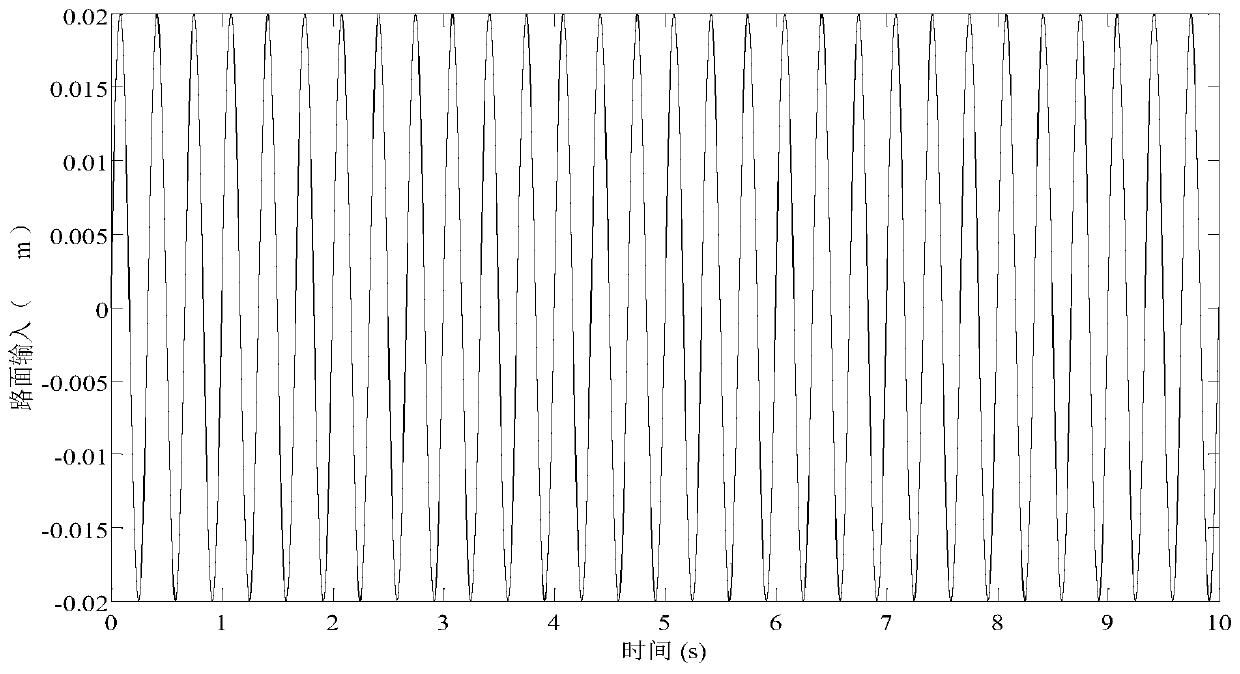
[0119] Step 3, controller parameter adjustment and comparison of simulation results.
[0120] The technical solution is described in detail as follows: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More