

A method and device for controlling multi-axis synchronous motion of a robot
A multi-axis synchronization and robot technology, applied in program control, digital control, electrical program control, etc., can solve problems such as inability to efficiently calculate the shortest motion time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0074] The limit acceleration includes the maximum acceleration a 1max and minimum acceleration-a 2max , and in step S10, the input parameters include the maximum acceleration a 1max and minimum acceleration-a 2max .
[0075] In the first case, the set of constraint equations specifically includes:
[0076] Trapezoidal speed planning method: and motion constraints:
[0077] Among them, v i is the actual maximum movement speed of the i-th axis, a 1i is the actual maximum acceleration of the i-th axis, a 2i is the absolute value of the actual minimum acceleration of the i-th axis, D i is the movement distance of the i-th axis, v max,i is the maximum movement speed allowed by the i-th axis, a 1max,i is the maximum acceleration allowed by the i-th axis, a 2max,i is the absolute value of the minimum acceleration allowed by the i-th axis, i is an integer and 1≤i≤N.
[0078] Here, those skilled in the art should understand that the minimum acceleration allowed by the i...
Embodiment 2
[0165] input maximum acceleration a 1max and minimum acceleration-a 2max are equal in absolute value.
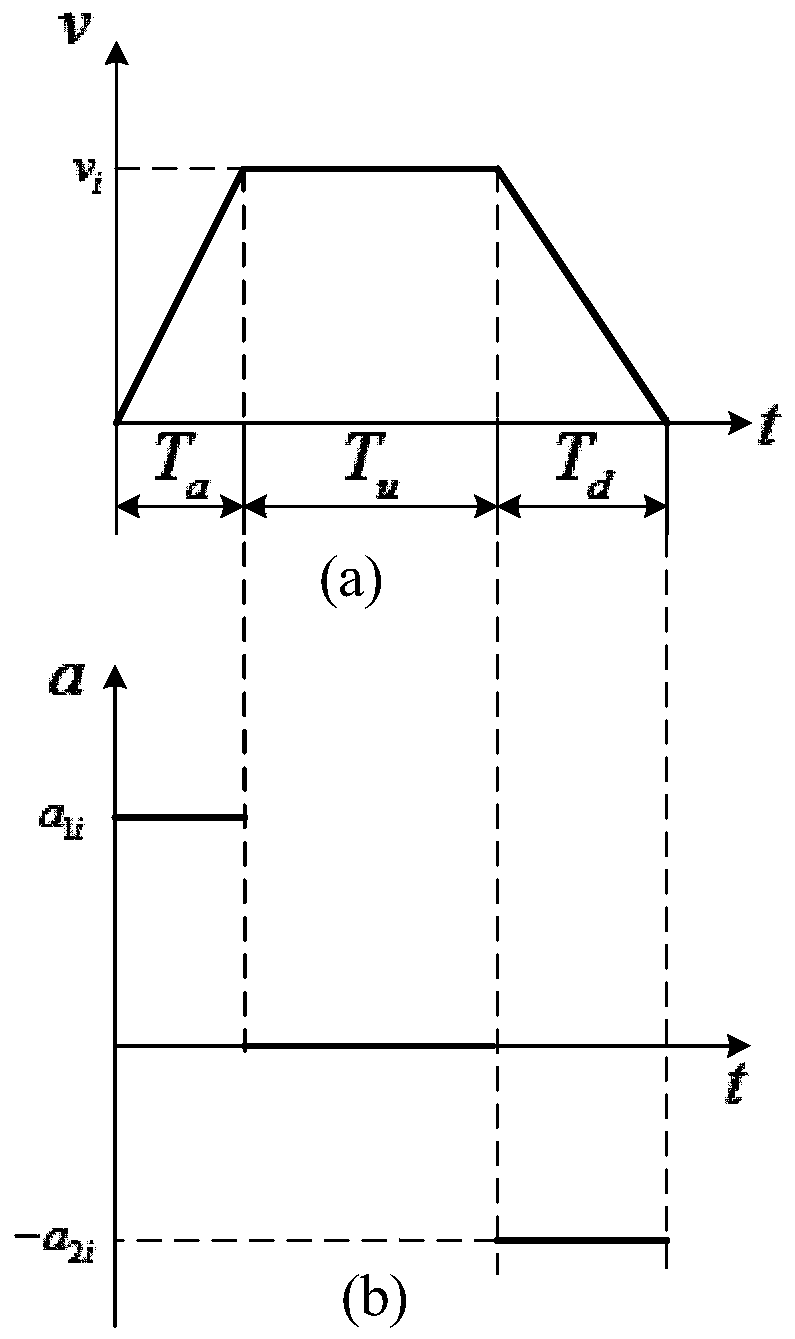
[0166] At this time, due to the input maximum acceleration a 1max and minimum acceleration-a 2max Therefore, when inputting the limit acceleration in step S10, you can only input one (only input the absolute value of the maximum acceleration or only the minimum acceleration), of course, you can also input both. When only one is entered, that is, the maximum acceleration of the i-th axis is equal to the absolute value of the minimum acceleration, such as Figure 4 As shown in (a) and (b), a 1i =a 2i ,T a =T d .
[0167] In the second case, the set of constraint equations specifically includes:
[0168] Trapezoidal speed planning method: and motion constraints: v i ≤v max,i , a 1i ≤a 1max,i ,T u ≥0, T a >0.
[0169] Among them, when the input is the maximum acceleration, a 1max,i is the maximum acceleration of the i-th axis; when the input is the minimum acc...
Embodiment 3
[0182] Motion parameters also include limit jerk; said limit acceleration includes maximum acceleration a 1max and minimum acceleration-a 2max ; The limit jerk includes the maximum jerk j 1max and minimum jerk-j 2max .
[0183] Among them, the maximum acceleration a 1max and the absolute value of the minimum acceleration a 2max May or may not be equal. Maximum jerk j 1max and the absolute value of the minimum jerk j 2max May or may not be equal.
[0184] In the third case, the set of constraint equations specifically includes: a double S-type speed planning method:
[0185] and motion constraints:
[0186] Among them, T a1 is the jerk time, T au is the uniform acceleration time, T a2 is the deceleration and acceleration time, T d1 is the acceleration and deceleration time, T du is the uniform deceleration time, T d2 is the deceleration time, D i is the movement distance of the i-th axis, v i is the actual maximum movement speed of the i-th axis, a 1i is t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More