

Stabilizer for robotic beating-heart surgery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
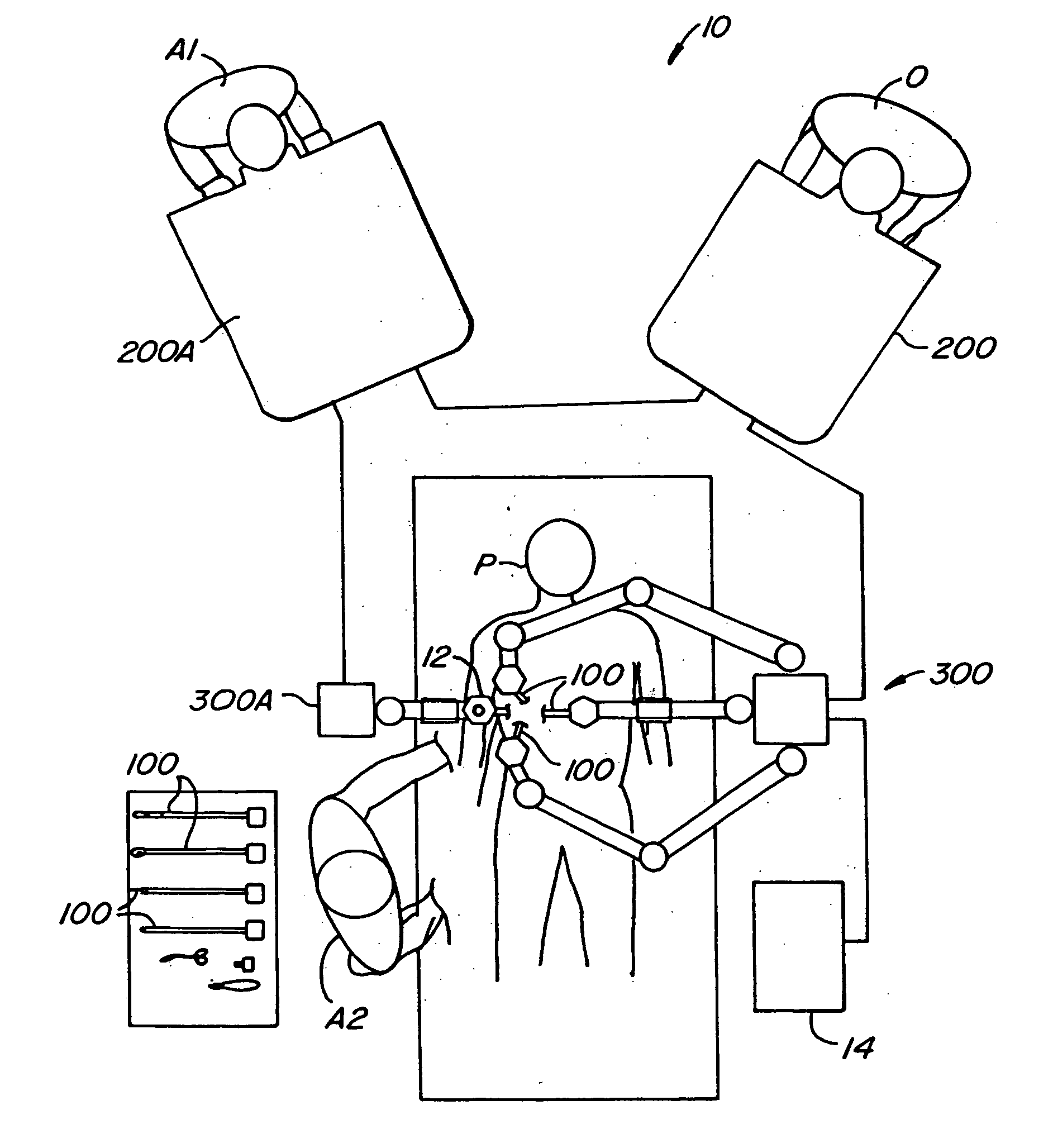
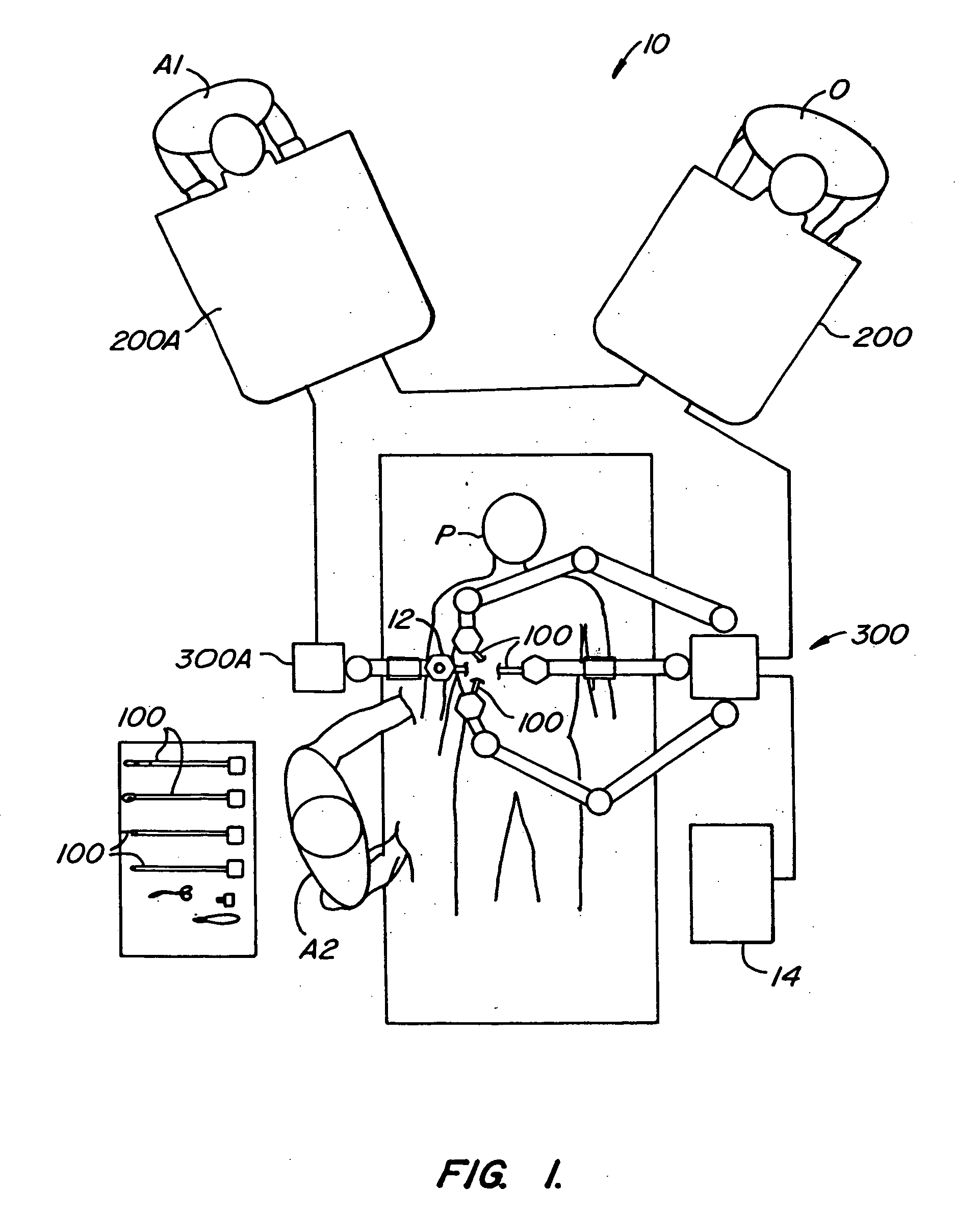
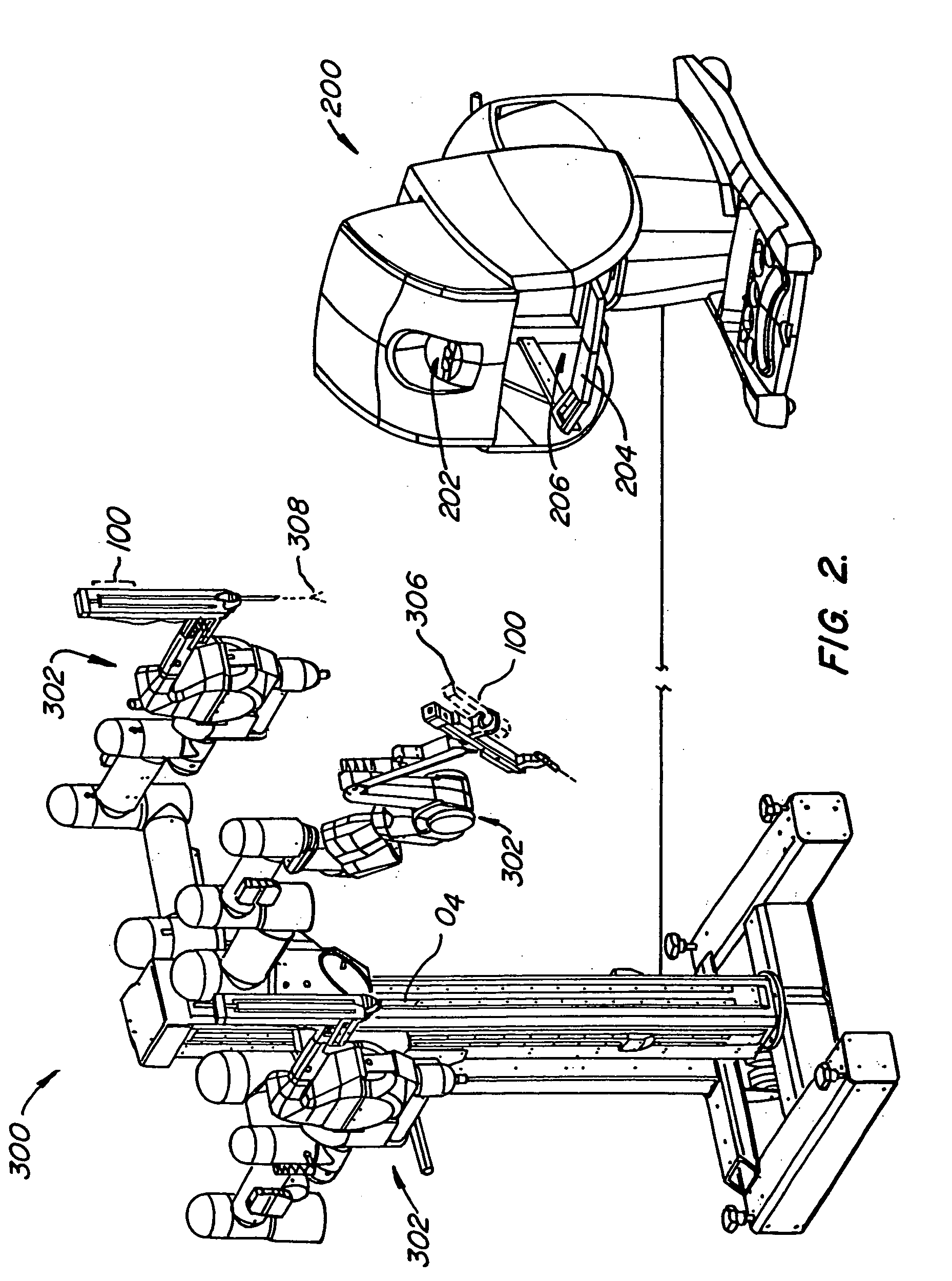
[0041] Referring now to FIG. 1, a robotic surgical system 10 includes a master control station 200 and a slave cart 300. Optionally, any of several other additional components may be included in the surgical system to enhance the capabilities of the robotic devices to perform complex surgical procedures. An operator O performs a minimally invasive surgical procedure at an internal surgical site within patient P using minimally invasive surgical instruments 100. Operator O works at master control station 200. Operator O views a display provided by the workstation and manipulates left and right input devices. The telesurgical system moves surgical instruments mounted on robotic arms of slave cart 300 in response to movement of the input devices. As described in co-pending U.S. patent application Ser. No. 09 / 433,120, filed on Nov. 3, 1999 (Attorney Docket No. 17516-004720), the full disclosure of which is incorporated herein by reference, a selectively designated “left” instrument is a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More