

Soft body driver
A technology of software drivers and driving devices, applied in manipulators, manufacturing tools, etc., can solve problems such as application limitations of soft robots, and achieve the effects of omitting external energy supply, quick output response, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
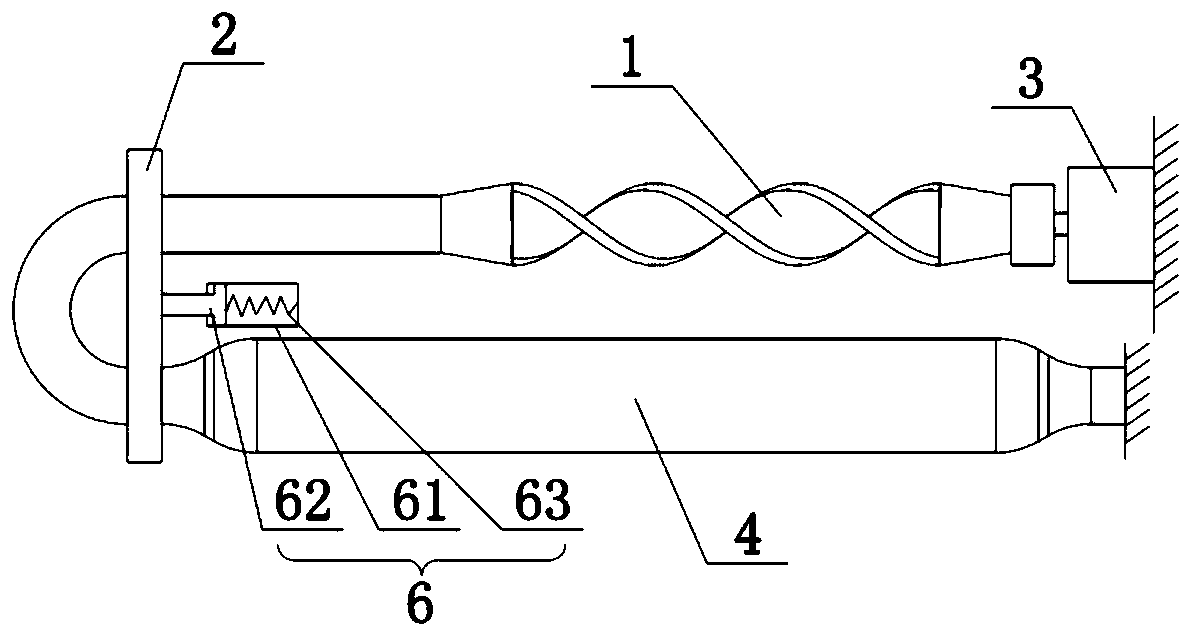
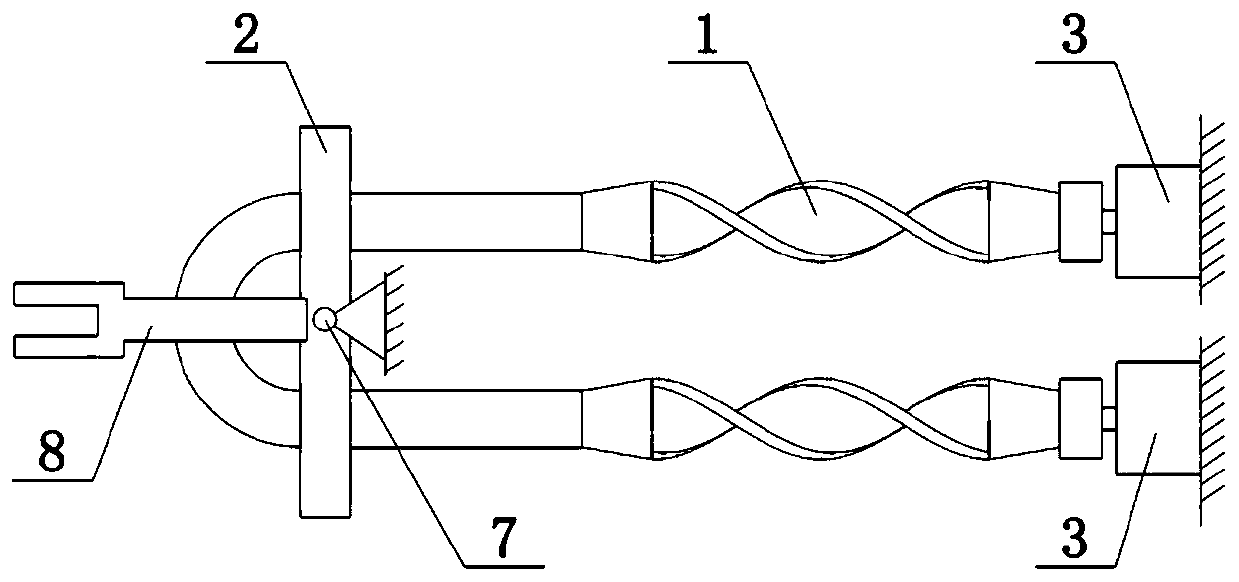
[0039] This embodiment provides a software driver, including a twist tube 1 , an adapter part 2 and a driving device 3 . Wherein, the inner cavity of the torsion tube 1 is filled with fluid, the torsion tube 1 is provided with a positioning part and a movable part, and the segment between the positioning part and the movable part on the torsion tube 1 is a torsion segment, and the adapter part 2 is connected At the positioning part, the driving device 3 is connected to the movable part, and the driving device 3 can drive the movable part to rotate relative to the positioning part. When reset relative to the positioning site, the extruded fluid flows back into the torsion section, and the torsion section can change its own length by twisting and / or control the deformation of the external parts by retracting and releasing the fluid.
[0040] In the software actuator of the present invention, the torsion tube 1 is twisted by the driving device 3, and the part of the torsion tube ...
Embodiment 2
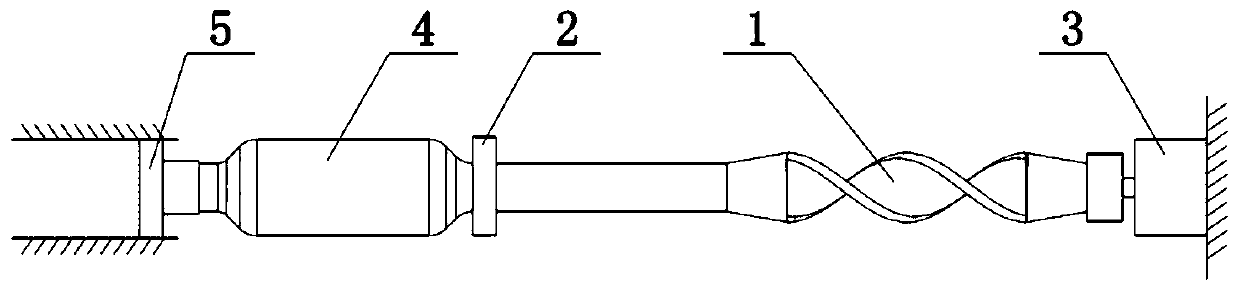
[0043] This embodiment provides a soft driver, which, on the basis of Embodiment 1, also includes an expansion part 4, the inner cavity of the expansion part 4 communicates with the inner cavity of the twist tube 1, and the positioning part and the movable part are respectively located in the twist tube. At both ends of 1, when the movable part rotates relative to the positioning part, the fluid in the torsion section is squeezed into the expansion part 4, and when the movable part is reset relative to the positioning part, the fluid flows back from the expansion part 4 to the torsion section .
[0044] In this embodiment, the expansion component 4 can only be used as a fluid-accommodating component, and the length of the twisted segment itself changes during the control process. The expansion component 4 can also be used as an external component, when the twisted segment squeezes the fluid into the expansion component 4, the expansion part 4 expands and deforms to shorten, an...
Embodiment 3
[0046] Such as figure 1As shown, this embodiment provides a software driver, which further illustrates the operation mode of the expansion member 4 on the basis of the second embodiment. Wherein, the end of the expansion part 4 far away from the positioning part is connected with the first actuator part 5, and the first actuator part 5 is movable along a straight line. The first actuator 5 translates.
[0047] In this embodiment, among both the adapter part 2 and the drive device 3, only the drive device 3 is fixed, the first actuator part 5 is slidably arranged in a fixed groove, and the axis of the expansion part 4 coincides with the axis of the torsion tube 1. on a straight line.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More